
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Anomaly Detection of UAV State Data Based on Single-Class Triangular Global Alignment Kernel Extreme Learning Machine
1 School of Computer, Jiangsu University of Science and Technology, Zhenjiang, 212100, China
2 Department of Electrical and Computer Engineering, University of Nevada, Las Vegas, NV, 89154, USA
* Corresponding Author: Qi Wang. Email:
Computer Modeling in Engineering & Sciences 2023, 136(3), 2405-2424. https://doi.org/10.32604/cmes.2023.026732
Received 22 September 2022; Accepted 06 December 2022; Issue published 09 March 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
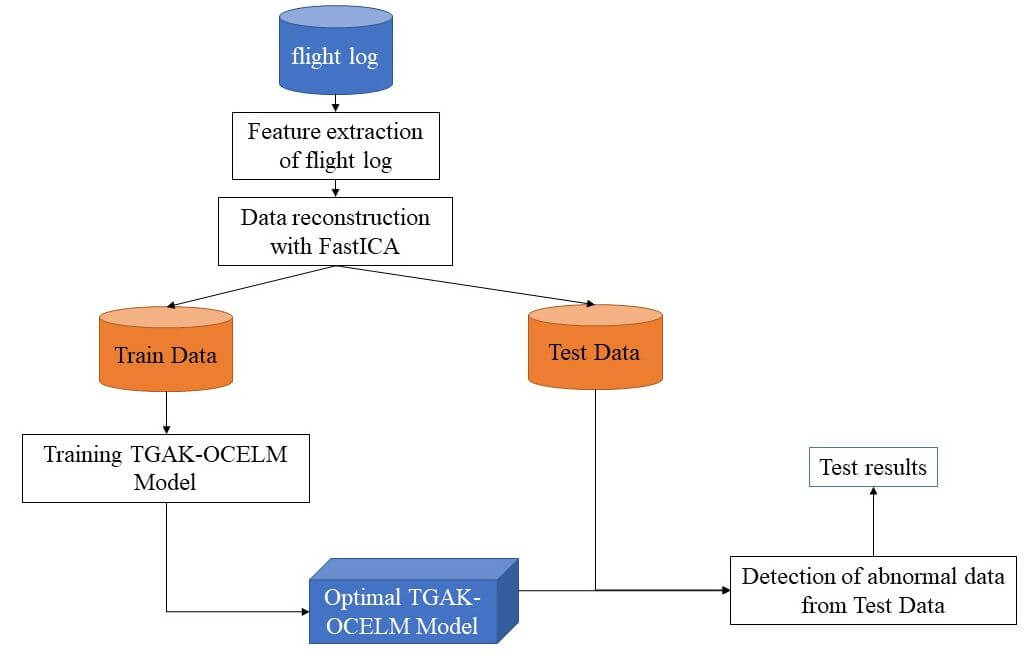
Unmanned Aerial Vehicles (UAVs) are widely used and meet many demands in military and civilian fields. With the continuous enrichment and extensive expansion of application scenarios, the safety of UAVs is constantly being challenged. To address this challenge, we propose algorithms to detect anomalous data collected from drones to improve drone safety. We deployed a one-class kernel extreme learning machine (OCKELM) to detect anomalies in drone data. By default, OCKELM uses the radial basis (RBF) kernel function as the kernel function of the model. To improve the performance of OCKELM, we choose a Triangular Global Alignment Kernel (TGAK) instead of an RBF Kernel and introduce the Fast Independent Component Analysis (FastICA) algorithm to reconstruct UAV data. Based on the above improvements, we create a novel anomaly detection strategy FastICA-TGAK-OCELM. The method is finally validated on the UCI dataset and detected on the Aeronautical Laboratory Failures and Anomalies (ALFA) dataset. The experimental results show that compared with other methods, the accuracy of this method is improved by more than 30%, and point anomalies are effectively detected.Graphic Abstract
Keywords
UAV safety; kernel extreme learning machine; triangular global alignment kernel; fast independent component analysis
Cite This Article
APA Style
Hu, F., Wang, Q., Shao, H., Gao, S., Yu, H. (2023). Anomaly Detection of UAV State Data Based on Single-Class Triangular Global Alignment Kernel Extreme Learning Machine. Computer Modeling in Engineering & Sciences, 136(3), 2405–2424. https://doi.org/10.32604/cmes.2023.026732
Vancouver Style
Hu F, Wang Q, Shao H, Gao S, Yu H. Anomaly Detection of UAV State Data Based on Single-Class Triangular Global Alignment Kernel Extreme Learning Machine. Comput Model Eng Sci. 2023;136(3):2405–2424. https://doi.org/10.32604/cmes.2023.026732
IEEE Style
F. Hu, Q. Wang, H. Shao, S. Gao, and H. Yu, “Anomaly Detection of UAV State Data Based on Single-Class Triangular Global Alignment Kernel Extreme Learning Machine,” Comput. Model. Eng. Sci., vol. 136, no. 3, pp. 2405–2424, 2023. https://doi.org/10.32604/cmes.2023.026732
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools