
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Deep Learning Based Automatic Charging Identification and Positioning Method for Electric Vehicle
1 School of Mechanical and Electrical Engineering, Qingdao University, Qingdao, 266071, China
2 School of Mechanical Engineering, Beijing Institute of Technology, Beijing, 100081, China
3 National Engineering Research Center for Intelligent Electrical Vehicle Power System, Qingdao University, Qingdao, 266071, China
* Corresponding Authors: Chao Sun. Email: ; Qinghai Zhao. Email:
Computer Modeling in Engineering & Sciences 2023, 136(3), 3265-3283. https://doi.org/10.32604/cmes.2023.025777
Received 29 July 2022; Accepted 08 November 2022; Issue published 09 March 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
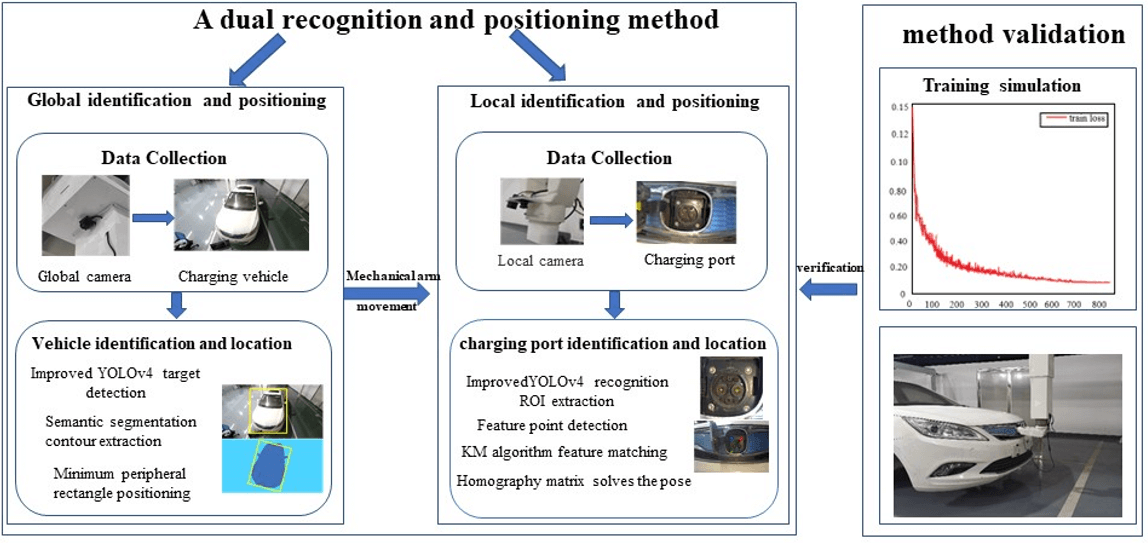
Electric vehicle charging identification and positioning is critically important to achieving automatic charging. In terms of the problem of automatic charging for electric vehicles, a dual recognition and positioning method based on deep learning is proposed. The method is divided into two parts: global recognition and localization and local recognition and localization. In the specific implementation process, the collected pictures of electric vehicle charging attitude are classified and labeled. It is trained with the improved YOLOv4 network model and the corresponding detection model is obtained. The contour of the electric vehicle is extracted by the BiSeNet semantic segmentation algorithm. The minimum external rectangle is used for positioning of the electric vehicle. Based on the location relationship between the charging port and the electric vehicle, the rough location information of the charging port is obtained. The automatic charging equipment moves to the vicinity of the charging port, and the camera near the charging gun collects pictures of the charging port. The model is detected by the Hough circle, the KM algorithm is used for feature matching, and the homography matrix is used to solve the attitude. The results show that the dual identification and location method based on the improved YOLOv4 algorithm proposed in this paper can accurately locate the charging port. The accuracy of the charging connection can reach 80%. It provides an effective way to solve the problems of automatic charging identification and positioning of electric vehicles and has strong engineering practical value.Graphic Abstract
Keywords
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools