
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

Floyd-Warshall Algorithm Based on Picture Fuzzy Information
1
School of Systems and Technology, University of Management and Technology, Lahore, Pakistan
2
Department of Mathematics, University of the Punjab, New Campus, Lahore, Pakistan
3
Department of Mathematics, Faculty of Science and Arts, Mahayl Assir, King Khalid University, Abha, Saudi Arabia
4
Department of Mathematics and Computer, Faculty of Science, Ibb University, Ibb, Yemen
* Corresponding Author: Muhammad Akram. Email:
(This article belongs to the Special Issue: Decision making Modeling, Methods and Applications of Advanced Fuzzy Theory in Engineering and Science)
Computer Modeling in Engineering & Sciences 2023, 136(3), 2873-2894. https://doi.org/10.32604/cmes.2023.026294
Received 28 August 2022; Accepted 30 November 2022; Issue published 09 March 2023
 View Full Text
View Full Text Download PDF
Download PDFAbstract
The Floyd-Warshall algorithm is frequently used to determine the shortest path between any pair of nodes. It works well for crisp weights, but the problem arises when weights are vague and uncertain. Let us take an example of computer networks, where the chosen path might no longer be appropriate due to rapid changes in network conditions. The optimal path from among all possible courses is chosen in computer networks based on a variety of parameters. In this paper, we design a new variant of the Floyd-Warshall algorithm that identifies an All-Pair Shortest Path (APSP) in an uncertain situation of a network. In the proposed methodology, multiple criteria and their mutual association may involve the selection of any suitable path between any two node points, and the values of these criteria may change due to an uncertain environment. We use trapezoidal picture fuzzy addition, score, and accuracy functions to find APSP. We compute the time complexity of this algorithm and contrast it with the traditional Floyd-Warshall algorithm and fuzzy Floyd-Warshall algorithm.Graphic Abstract

Keywords
The Shortest Path Algorithm (SPA) is a family of graph algorithms designed to solve the Shortest Path Problem (SPP). In a graph, all nodes are joined by edges. If more than one route is available, the question arises as to which path should be chosen at the lowest cost or distance. The main goal of the SPA is to find the minimum cost path. There are two types of SPP, Single Source Shortest Path (SSSP) problem and All Pair Shortest Path (APSP) problem. The SSSP problem finds the shortest paths from a source vertex to all other vertices in the graph. APSP finds the shortest path between every pair of vertices in any graph. These algorithms are applicable in a variety of situations. A few of these include transportation networks, computer networks, Google maps, inventory systems, and labor locations, among many others. In all these real-world scenarios, we need to find the shortest path between any pair of points. How can the shortest path be found between any two nodes if the network situation is uncertain? The classic algorithm is appropriate when the network situation is certain and the weights are crisp. But, in reality, networks are not certain. Fuzzy set theory has been employed to deal with these uncertainties. This theory was presented by Zadeh in 1965 for making decisions under uncertain conditions [1]. In 1986, Atanassov introduced the extension of classical fuzzy sets and named it an Intuitionistic Fuzzy Set (IFS) [2]. In IFS, a set has two components: membership and non-membership. This new theory handled uncertainties more effectively and applied them to many fields. After a few years, it was experienced that in many cases, the neutral section needs to give more freedom to express the expert opinion. Consequently, in 2013 Cuong et al. introduced a general form of IFS called Picture Fuzzy Set (PFS) [3,4]. A real number can be generalized into a fuzzy number. Unlike trapezoidal intuitionistic fuzzy numbers discussed by Wan et al. [5], which only have two components, trapezoidal picture fuzzy numbers have three aspects for every input. There are membership and non-membership components in a trapezoidal intuitionistic fuzzy set. The hesitation component of this number can be obtained by deducting 1 from the total membership and non-membership values. Whereas, a trapezoidal intuitionistic fuzzy number is ineffective to illustrate the neutral part of a number, which is provided in a trapezoidal picture fuzzy number to give more flexibility to human opinion.
In 1980, Dubois et al. proposed the concept of fuzzy shortest path (FSP) [6]. They used the ranking index approach to find the shortest route. In 1994, Okada et al. [7] introduced an algorithm based on the Dijkstra algorithm in which they used fuzzy order to compare the lengths of the two routes for finding the FSP. In 2009, Mahdavi et al. [8] proposed a dynamic programming (DP) approach for FSPP, taking into account the length of the triangle and trapezoidal arc. In 2012, Dou et al. [9] offered a model for finding FSP using MCDM based on its earlier approach, i.e., measuring ambiguous similarities. So, there are various methods to find the SPP, some of which are discussed in [10,11]. The Floyd-Warshall algorithm uses the dynamic programming approach to find APSP, where the edge weight is given as a crisp number. Due to its structural similarities with matrix multiplication, it is an attractive choice for each pair of short paths in high-performance systems. This algorithm estimates the shortest path between the two vertices at each stage until the minimum value is achieved. Suppose G is a graph with V set of vertices, each numbered from 1 to N. To find the shortest path, there is the shortest path function (i, j, k), which returns the shortest path from i to j using k as an intermediate point. Garg et al. [12] suggested that the Floyd-Warshall algorithm can compete with Dijkstra’s algorithm for sparse graphs. If you have N nodes, then there are
The investigation presented in this article is motivated by the following targets:
1. Shortest path problems, in literature, are classified as single-source shortest path problems and do not cover all pair shortest path problems.
2. Real-time scenarios may involve ambiguity; therefore in typical situations, a crisp approach for APSP may not be appropriate.
3. The IFS, on the other hand, deals with the membership and non-membership components of a set with the condition that their sum should not be greater than one, which leads to numerous problems in decision-making. The picture fuzzy set, which also includes the neural component of the set, is a generalization of IFSs. As a result, we have more degrees of freedom to make better decisions.
4. The Floyd-Warshall algorithm has numerous real-time applications. In computer networks, for instance, calculating APSP from any source to any destination is necessary.
5. Each edge may hold weights of various criteria; however, in most of the research studies, only one criterion is taken into consideration when assigning the weight of each edge.
Our contribution to this work is demonstrated below concerning these issues:
1. We introduce a new variant of classical Floyd’s algorithm using trapezoidal picture fuzzy numbers. This algorithm computes the smallest weights of all possible routes for each pair of points. This algorithm is more effective in finding the shortest path.
2. We design the algorithm and determine its time complexity to demonstrate the complete functioning of the picture fuzzy Floyd-Warshall (PF Floyd-Warshall).
3. We contrast our approach with already used techniques to demonstrate how the suggested method is an improved version of the current ones.
4. The suggested algorithm can select the optimum route using up to n criteria weights for each edge.
The rest of the paper is organized in the following way: Section 2 presents the concepts related to picture fuzzy sets. Section 3 discusses the complete working of the picture fuzzy Floyd-Warshall algorithm. Section 4 describes the implementation of the picture fuzzy Floyd-Warshall algorithm in networks. Section 5 gives a comparative analysis of PF Floyd-Warshall with the fuzzy Floyd-Warshall algorithm. Section 6 concludes this paper and displays feasible future directions.
In this section, we recall some basic notions related to PFSs and PFNs.
Definition 2.1. [4] A Picture Fuzzy Set (PFS) S on universe U is defined as
where
Moreover,
Definition 2.2. [17] A PFN N in the set of real numbers R can be defined as
where
The TPFN is represented as
Example 2.1. Fig. 1 shows the plot for TPFN.
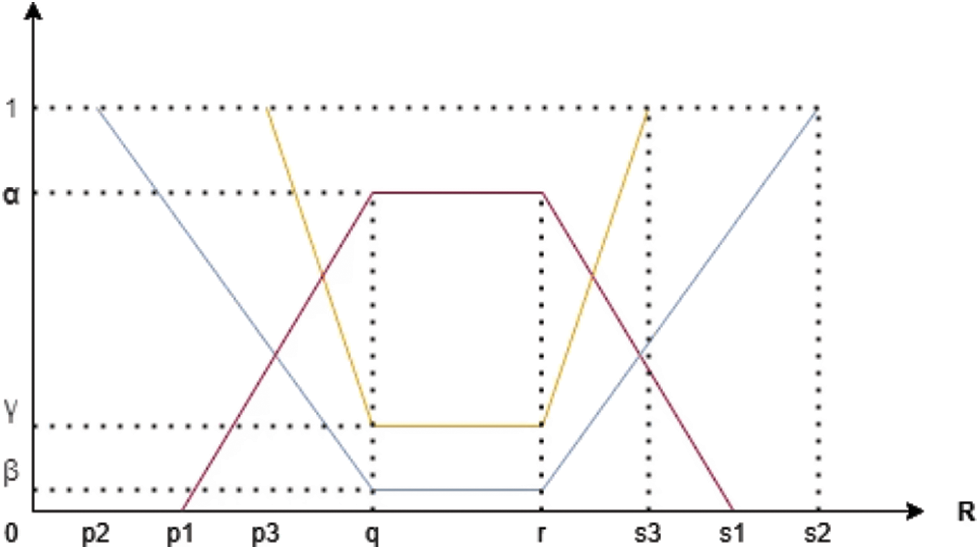
Figure 1: TPFN
Remark 2.1. If
2.1 Arithmetic Operations on PFS
Some basic operations of PFS proposed by Akram et al. [17] is described below:
Let
1. Addition:
2. Multiplication:
3. Multiplication with a constant: If k be a constant value then
4. Power and exponent [17]: If k be an exponent value then
For a trapezoidal PFN
Definition 2.3. [17] Let
where
Definition 2.4. [17] Let
where
Certain new methods have been discussed in [33,34].
Definition 2.5. [33] A linguistic variable is a variable, whose values are words or sentences in a natural or artificial language. These linguistic terms are very close to human understanding, so instead of remembering picture fuzzy numbers, the user can use these terms. These variables also hide the complexity of the system and make it more understandable. Picture fuzzy numbers are also denoted by some linguistic terms. For example, very low is a linguistic variable and its corresponding TPFN is ([1, 2, 3, 5]; 0.6, 0.1, 0.2) (see Eq. (6)). The linguistic variables and their picture fuzzy numbers are pre-defined.
2.3 Classical Floyd-Warshall Algorithm
The classical Floyd-Warshall algorithm described in [13] is used for finding APSP. Lets consider three weighted nodes x, y, and k to find shortest path from x to y via k node using following equation:
k is the pivotal point and its value lies between 1 to n.
The step-by-step execution of this algorithm is given below:
Step 1: Initialize the graph using certain values defined by the user. Build a square matrix that consists of n rows and columns. Each entry is represented as
Step 2: Take k as a pivot row and k pivot column and for all x and y we perform triple operation on every
• Define
• Define
Step 3: After n steps, we get final matrices
• From
• From
Stop the iterations when
3 Picture Fuzzy Floyd-Warshall Algorithm
In this section, we propose a new variant of the classical Floyd-Warshall algorithm. We apply PFN on Floyd-Warshall Algorithm to find APSP. Table 1 shows the description of the notions used in this article.

The step-by-step execution of the proposed algorithm is given below:
Step 1: Initially, label each edge with the appropriate PFN. These PFNs are acting as weights. If there is more than one criterion, the edge carries more than one PFN separated by commas. As we want to find the shortest path, therefore self-loops are avoided. The self-loops need to remove.
Step 2: Write initial matrix
Step 3: The next task is to find the shortest path between any pair of nodes. For this, use Eq. (14) to find the shortest path from x to y via k. In the single iteration, we may not get the shortest path for all pairs of nodes; therefore this step needs to repeat for all pairs in a graph. When
Step 4: Pick the value in the vector that has the most true values.
Fig. 2 shows the pictorial representation of the picture fuzzy Floyd-Warshall algorithm.
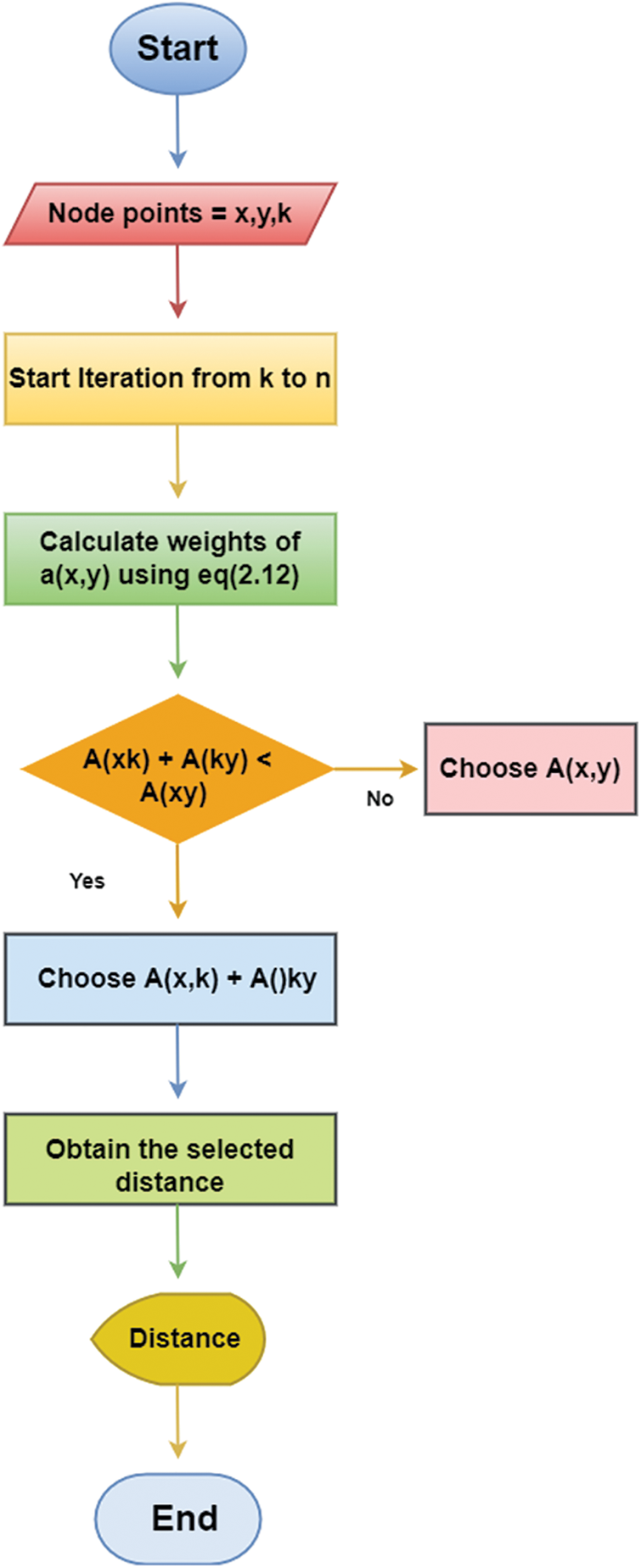
Figure 2: Flowchart of picture fuzzy Floyd-Warshall algorithm
3.1 Presentation and Complexity of the Algorithm
The following algorithm helps to understand the complete working of PF Floyd-Warshall algorithm:

:
Let us compute the time complexity of the above algorithm. Line 1 defines the function’s name and takes graph G as input. Here, G represents the layout of a network. In line 3, we take two integers x and y to locate cell values in a two-dimensional array and initialize them with 0. In line 4, a square matrix A of
This section illustrates the working of our proposed algorithm. For this purpose, consider a transportation network shown in Fig. 3. The transition time on edges is represented as TPFN edge
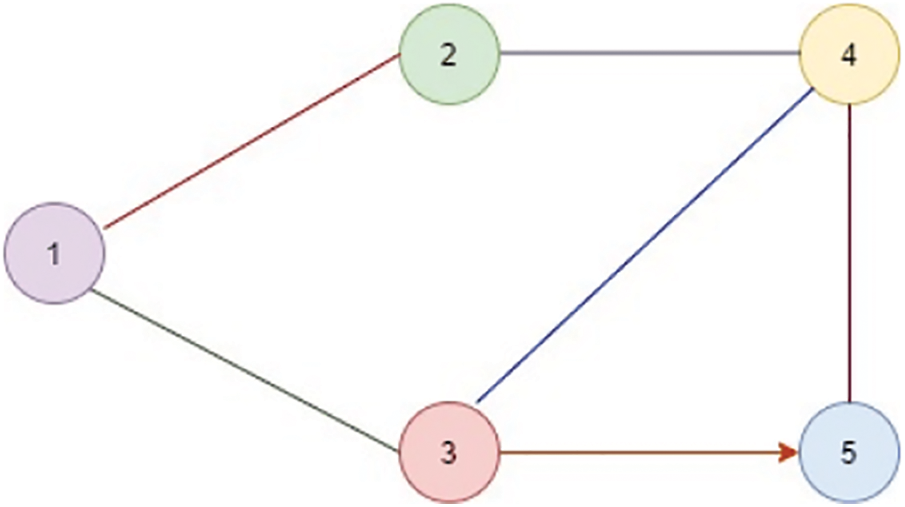
Figure 3: Transportation network model
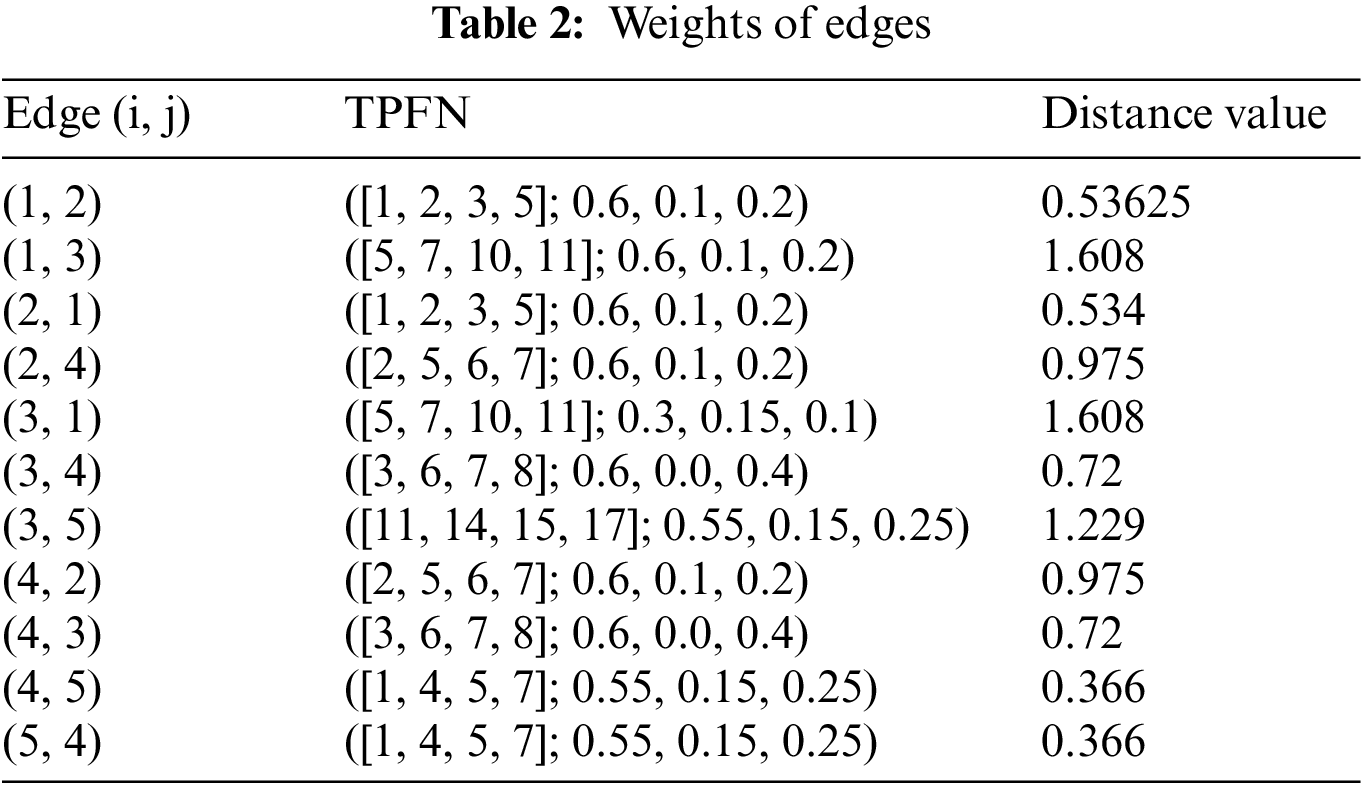
For edge
In the same way, we compute the distance for other pairs. Table 2 shows the weights on each edge.
Iteration 0:
The matrices
All iterations of the picture fuzzy Floyd-Warshall algorithm are shown in Table 3.

The obtained results are the same as proposed in [13]. For instance, shortest route from node 1 to 5 is
4 Application of Picture Fuzzy Floyd-Warshall Algorithm in Routing
The computer network is the interconnection of multiple communicating devices so that they can share their resources. To share their resources, we need routes. These routes can be wired or wireless. In computer networks, multiple routes can exist between any pair of nodes. Among these routes, we need to choose the best route for sending data. Different parameters help to determine the best route among all available routes. Examples of such parameters are length, bandwidth, load, hop count, cost, delay, maximum transmission unit, and reliability. Fig. 4 shows a hypothetical layout of a network, where all nodes can communicate with each other, but the question is which path is good for communication at any particular time.
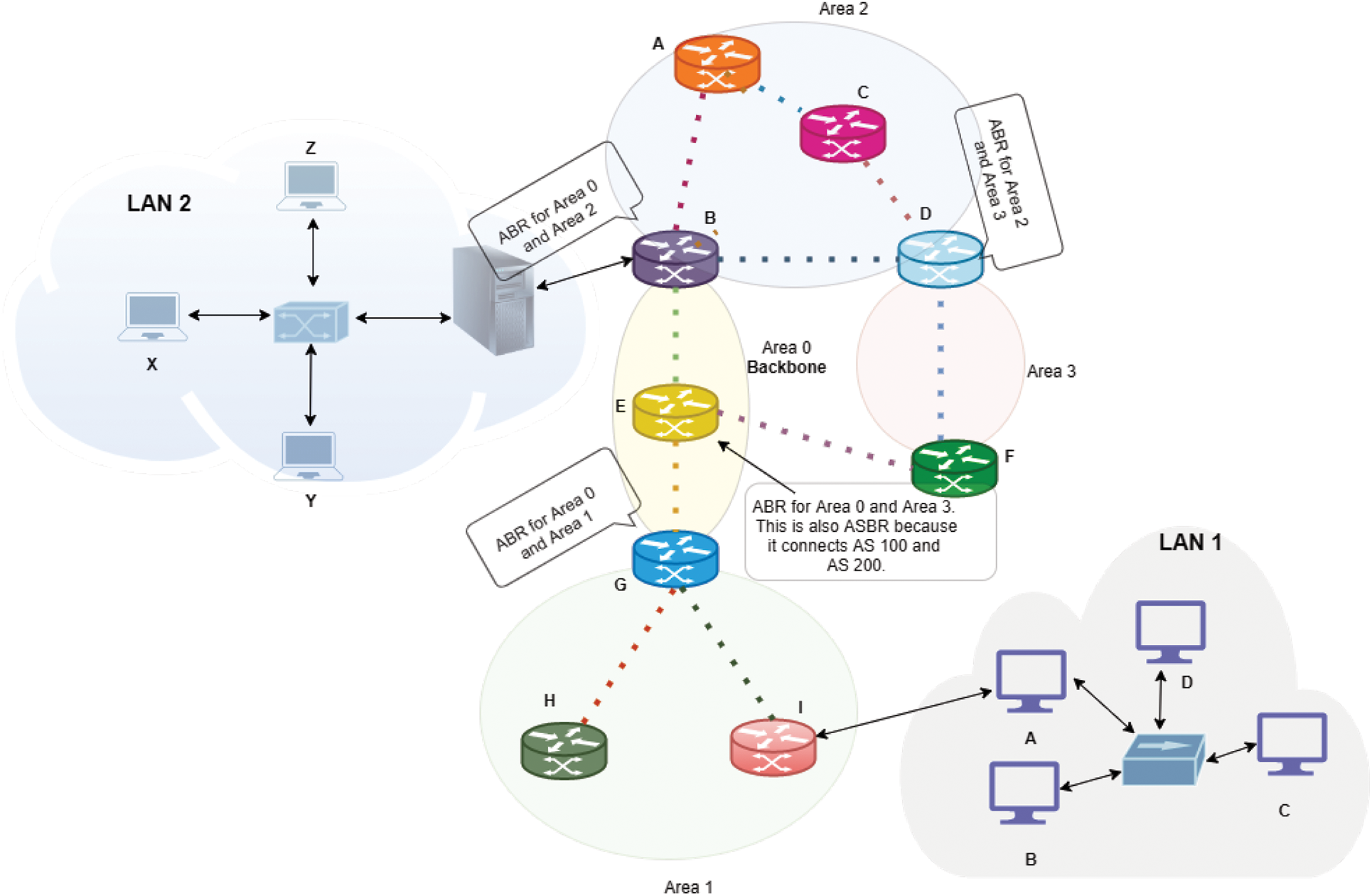
Figure 4: Hypothetical network layout
4.1 Best Path Selection in Computer Networks
Let us consider the same network situation as shown in Fig. 3. In the previous scenario, only one parameter is used for finding APSP, but now we used all network parameters and find APSP using our proposed algorithm. The considered parameters are length, bandwidth, delay, cost, MTU, throughput, hop count, load, and reliability. We know that the dynamics of the networks can not be the same all the time, they change according to network conditions which may results in a change of best path as well. If a path is best at any time t, it may be not best for the next moment if network dynamics change. Under such uncertain situations, PFS suits well to choose an appropriate path by considering ongoing network conditions. To understand the working of our algorithm in the said situation. We apply our proposed algorithm to find the best route among all possible options. Table 4 shows the TPFN that we are going to use in this example.
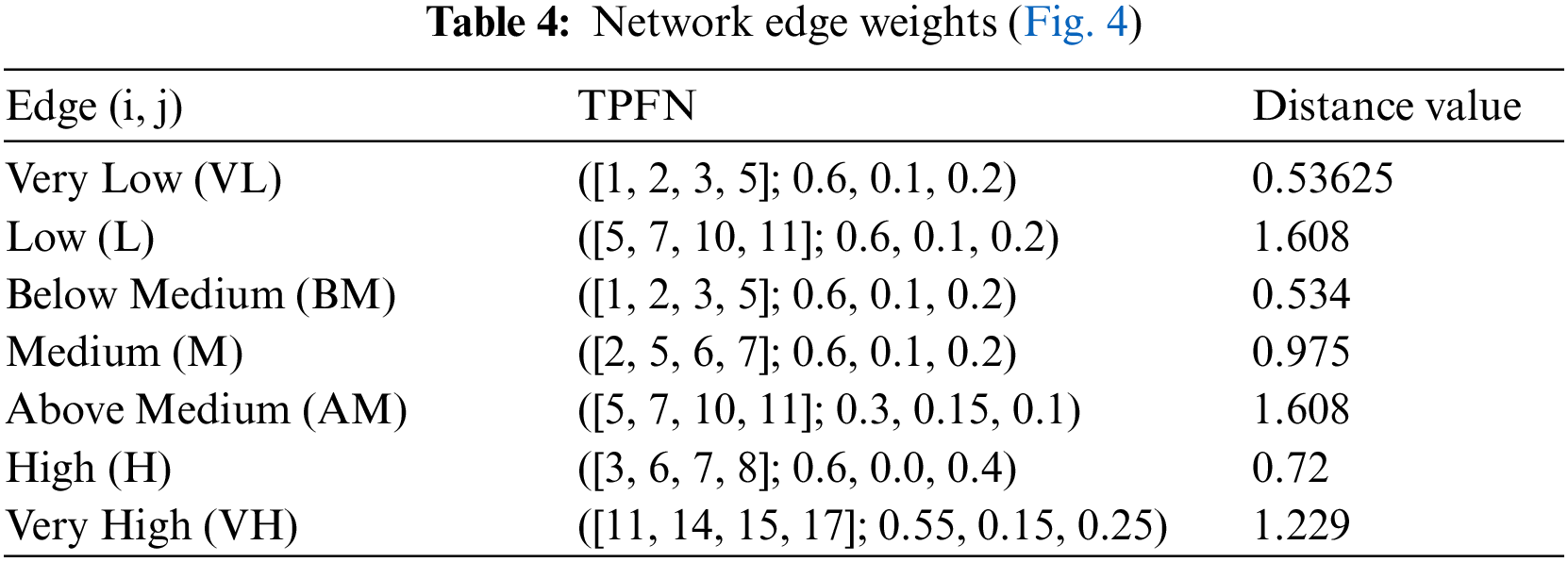
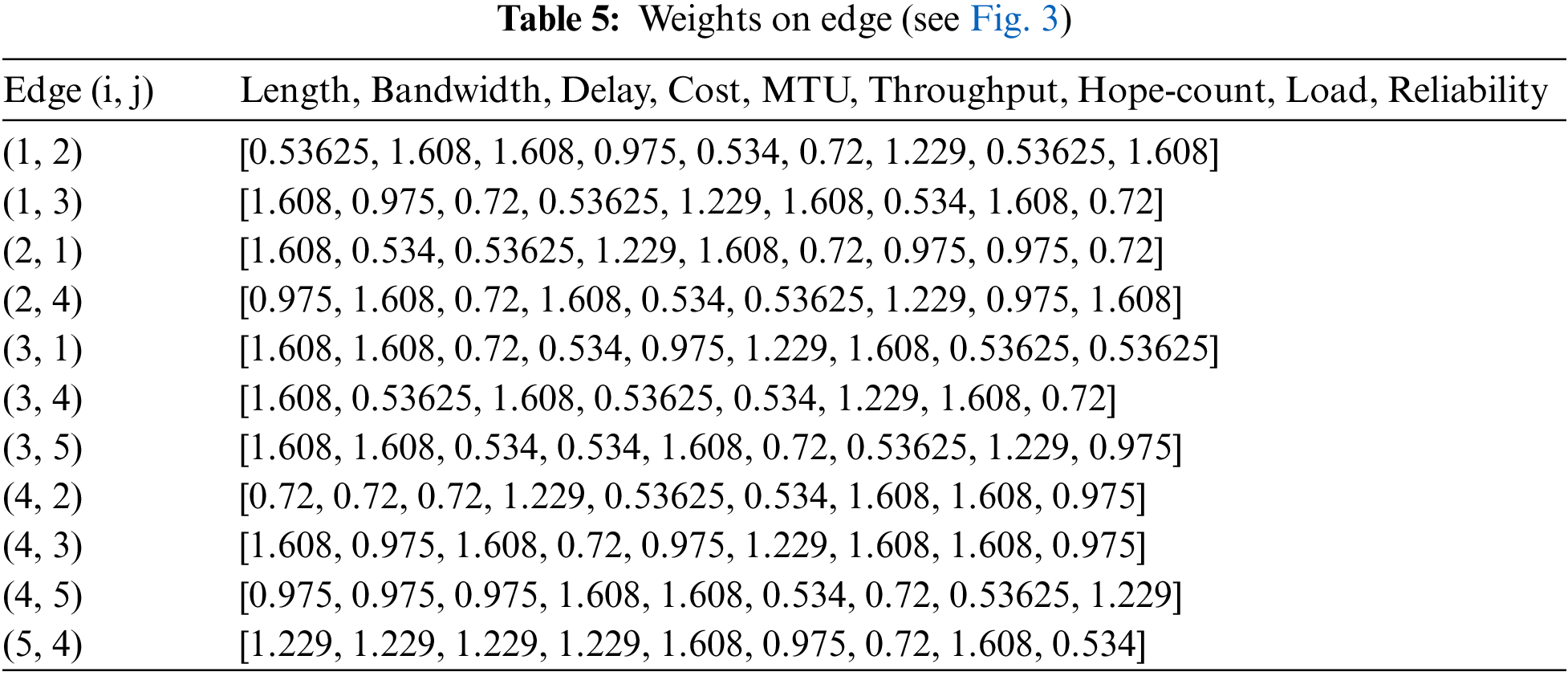
Table 5 shows the current situation of a network in linguistic terms. Each linguistic term corresponds to mentioned TPFN in Table 4.
Iteration 0: The matrices
Iteration 1: Set
[2, 3] = [2, 1] + [1, 3] = [0.534, 1.608, 0.536, 1.229, 1.608, 0.72, 0.975, 0.975, 0.72] + [1.608, 0.975, 0.72, 0.536, 1.229, 0.534, 1.608, 1.608, 0.72] = [2.142, 2.583, 1.256, 1.765, 2.837, 1.254, 2.583, 2.583, 1.44] < [
[2, 4] = [2, 1] + [1, 4] = [0.534, 1.608, 0.536, 1.229, 1.608, 0.72, 0.975, 0.975, 0.72] + [1.229, 0.72, 0.534, 0.975, 1.608, 1.608, 0.536, 0.534, 1.229] = [ 0.975, 1.608, 0.72, 0.534, 1.608, 0.536, 1.229, 0.975, 1.608] < [
[2, 5] = [2, 1] + [1, 5] = [0.534, 1.608, 0.536, 1.229, 1.608, 0.72, 0.975, 0.975, 0.72 ] + [0.72, 1.608, 0.536, 0.975, 0.534, 1.608, 1.229, 1.608, 0.534] = [1.254, 3.216, 1.072, 2.204, 2.142, 2.328, 2.204, 2.583, 1.254] < [
[3, 2] = [3, 1] + [1, 2] = [1.608, 0.534, 0.72, 1.608, 0.975, 1.229, 1.608, 0.536, 0.536] + [0.536, 1.608, 0.534, 0.975, 1.608, 0.72, 1.229, 0.536, 1.608] = [2.144, 2.142, 1.254, 2.583, 2.583, 1.949, 2.837, 1.072, 2.144] < [
[3, 4] = [3, 1] + [1, 4] = [1.608, 0.534, 0.72, 1.608, 0.975, 1.229, 1.608, 0.536, 0.536] + [1.229, 0.72, 0.534, 0.975, 1.608, 1.608, 0.536, 0.534, 1.229] = [2.837, 1.254, 1.254, 2.583, 2.583, 1.949, 2.837, 1.072, 2.144] < [
[3, 5] = [3, 1] + [1, 5] = [1.608, 0.534, 0.72, 1.608, 0.975, 1.229, 1.608, 0.536, 0.536] + [0.72, 1.608, 0.536, 0.975, 0.534, 1.608, 1.229, 1.608, 0.534] = [0.534, 0.534, 1.256, 1.608, 1.509, 0.72, 0.536, 1.229, 0.975] < [
[4, 2] = [4, 1] + [1, 2] = [1.608, 1.608, 1.608, 0.72, 0.975, 0.536, 0.534, 1.608, 1.229] + [0.536, 1.608, 0.534, 0.975, 1.608, 0.72, 1.229, 0.536, 1.608] = [0.72, 0.72, 0.72, 1.229, 0.536, 1.256, 0.534, 1.608, 0.975] < [
[4, 3] = [4, 1] + [1, 3] = [1.608, 1.608, 1.608, 0.72, 0.975, 0.536, 0.534, 1.608, 1.229] + [1.608, 0.975, 0.72, 0.536, 1.229, 0.534, 1.608, 1.608, 0.72] = [2.862, 2.583, 1.976, 1.256, 2.204, 1.070, 2.142, 3.216, 1.949] < [
[4, 5] = [4, 1] + [1, 5] = [1.608, 1.608, 1.608, 0.72, 0.975, 0.536, 0.534, 1.608, 1.229] + [0.72, 1.608, 0.536, 0.975, 0.534, 1.608, 1.229, 1.608, 0.534] = [0.975, 0.975, 0.975, 1.608, 0.534, 1.608, 0.72, 0.536, 1.229] < [
[5, 2] = [5, 1] + [1, 2] = [0.536, 1.229, 1.608, 0.72, 0.536, 1.229, 0.534, 1.608, 0.975] + [0.536, 1.608, 0.534, 0.975, 1.608, 0.72, 1.229, 0.536, 1.608] = [1.072, 2.831, 2.142, 1.695, 2.144, 1.949, 1.763, 2.144, 2.583] < [
[5, 3] = [5, 1] + [1, 3] = [0.536, 1.229, 1.608, 0.72, 0.536, 1.229, 0.534, 1.608, 0.975] + [1.608, 0.975, 0.72, 0.536, 1.229, 0.534, 1.608, 1.608, 0.72] = [0.534, 1.608, 1.229, 0.536, 0.536, 1.229, 1.608, 0.975, 0.72] < [
[5, 4] = [5, 1] + [1, 4] = [0.536, 1.229, 1.608, 0.72, 0.536, 1.229, 0.534, 1.608, 0.975] + [1.229, 0.72, 0.534, 0.975, 1.608, 1.608, 0.536, 0.534, 1.229] = [1.229, 1.229, 1.229, 1.095, 1.608, 0.975, 0.72, 0.534, 1.604] < [
Now set
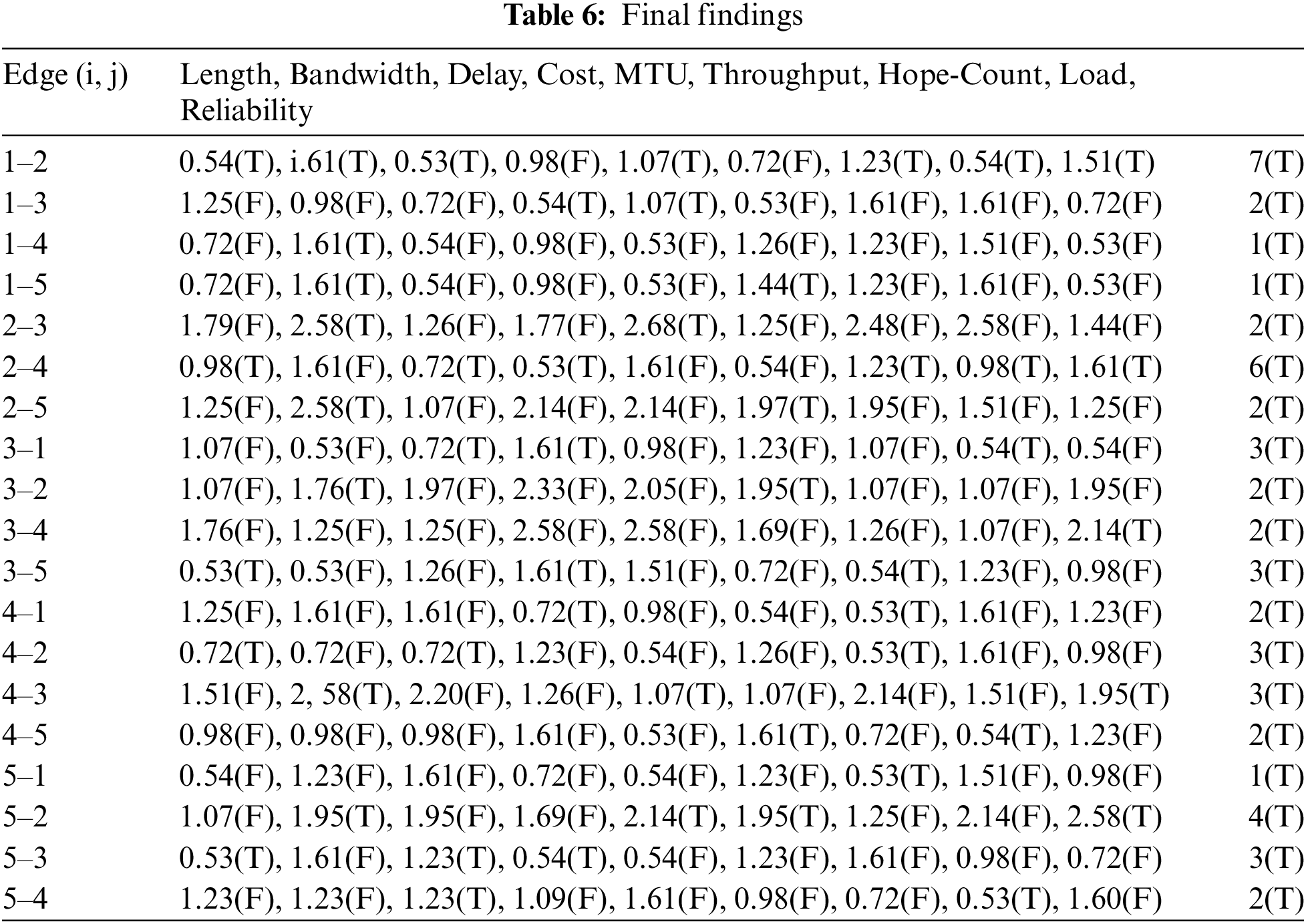
As we can see the shortest path from node 1 to 5 is
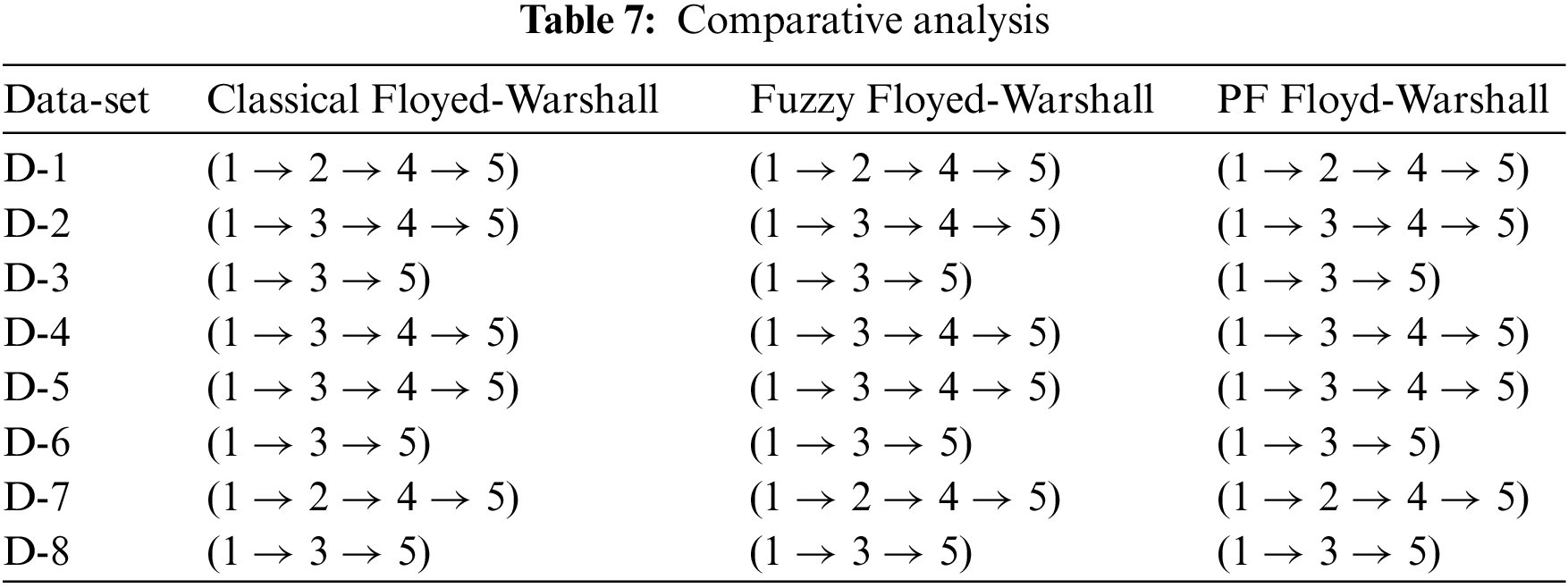
In this section, we provide a brief comparative analysis of the proposed algorithm with the classical Floyd-Warshall and fuzzy Floyd-Warshall algorithms. The classical Floyd-Warshall algorithm and fuzzy Floyd-Warshall algorithm take only one input parameter and decide the best route. But, in actual scenarios, multiple input factors may involve. In such scenarios, the previous techniques fail to take any decision. Whereas in the proposed method, we can work with n number of factors that may influence the final decision. For testing our model, we considered eight hypothetical data sets and applied PF Floyd-Warshall, fuzzy Floyd-Warshall, and the classical Floyd-Warshall algorithm. First of all, the picture fuzzy Floyd-Warshall algorithm calculates the distance between each pair using the score function of TPFN. Set the distance value to infinity if there is no direct connection found in the graph or network. Now consider the breaking point k which lies between 1 to n and check for each value of k if the distance of any pair of nodes passing through this breaking point is less than the previously defined distance, replace it with the new distance. If any criteria of a factor meet, assign true against that criteria. Lastly, choose one best path which is having maximum true values. We observed that all of the considered methods highlighted the same results against the same data sets, which proved the authenticity of our work. Table 7 shows the results of the comparative analysis. The first column is labeled as a graph. The data set is in the form of a Graph. We have taken the same graph as shown in Fig. 3 but with different edge weights. The second, third, and fourth columns show the results obtained from the classical Floyd-Warshall algorithm, fuzzy Floyd-Warshall algorithm, and picture fuzzy Floyd-Warshall algorithm, respectively. Table 7 shows the comparison of different Floyd-Warshall algorithms.
6 Conclusion and Future Directions
PFS is a useful and powerful tool to represent human opinion in terms of yes, abstain, no, and refusal. It gives more degrees of freedom than an intuitionistic fuzzy set (IFS). In short words, PFS is the generalized form of IFS. In this paper, we used PFN to find APSP using the Floyd-Warshall algorithm. The weights on each edge are defined as a PFN, and the distance between any two vertices is calculated using the expected value and score functions of PFN. Then we used triple operation to compare any two distances. This article has presented a new variant of the Floyd-Warshall algorithm to compute APSP. The picture fuzzy Floyd-Warshall algorithm incrementally finds APSP with the help of intermediate nodes. The time complexity of the proposed algorithm is
• The proposed method can be applied to find the fastest route for ambulance services.
• The proposed methodology can be used to locate the best route in the transportation network. The route depends on many factors, for example, construction activity, distance, fuel consumption, traffic situation, and many others.
• In medicine, different experts have different opinions about any treatment. Our proposed method helps to choose the most weighted opinion out of all opinions. The weight of each may depend on the qualification and experience of the expert, the cost of treatment, etc.
• Floyd-Warshall algorithm can be used to evaluate victim route planning.
• Information-Centric Network (ICN) heavily depends on the internet to perform information-related activities, like information access and delivery. Sometimes, we face cache overlap problems. To handle such problems, we can use the picture fuzzy Floyd-Warshall algorithm to find the shortest path in each subnet for retrieving the cache memory data quickly and removing invalid routes.
Funding Statement: The authors extend their appreciation to the Deanship of Scientific Research at King Khalid University for funding this work through General Research Project under Grant No. (R.G.P.2/48/43).
Ethics Approval: This article does not contain any studies with human participants or animals performed by the author.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. Zadeh, L. A. (1965). Fuzzy sets. Information and Control, 8(3), 338–353. https://doi.org/10.1016/S0019-9958(65)90241-X [Google Scholar] [CrossRef]
2. Atanassov, K. T. (1986). Intuitionistic fuzzy sets: Theory and applications. Fuzzy Sets and System, 20, 87–96. https://doi.org/10.1016/S0165-0114(86)80034-3 [Google Scholar] [CrossRef]
3. Cuong, B. C. (2013). Picture fuzzy sets-first results. Seminar on Neuro-fuzzy systems with applications, Institute of Mathematics, Vietnam Academy of Science and Technology, Hanoi, Vietnam. [Google Scholar]
4. Cuong, B. C., Kreinovich, V. (2013). Picture fuzzy sets–A new concept for computational intelligence problems. 2013 Third World Congress on Information and Communication Technologies (WICT), pp. 1–6. Hanoi, Vietnam. https://doi.org/10.1109/WICT.2013.7113099 [Google Scholar] [CrossRef]
5. Wan, S. P., Yi, Z. H. (2016). Power average of trapezoidal intuitionistic fuzzy numbers using strict t-norms and t-conorms. IEEE Transactions on Fuzzy Systems, 24(5), 1035–1047. https://doi.org/10.1109/TFUZZ.2015.2501408 [Google Scholar] [CrossRef]
6. Dubois, D., Prade, H. (1980). Fuzzy sets and systems: Theory and applications, vol. 144. Amsterdam: Academic Press. [Google Scholar]
7. Okada, S., Gen, M. (1994). Fuzzy shortest path problem. Computers & Industrial Engineering, 27, 465–468. https://doi.org/10.1016/0360-8352(94)90335-2 [Google Scholar] [CrossRef]
8. Mahdavi, I., Nourifar, R., Heidarzade, A., Amiri, N. M. (2009). A dynamic programming approach for finding shortest chains in a fuzzy network. Applied Soft Computing, 9(2), 503–511. 110.1016/j.asoc.2008.07.002 [Google Scholar]
9. Dou, Y., Zhu, L., Wang, H. S. (2012). Solving the fuzzy shortest path problem using multi-criteria decision method based on vague similarity measure. Applied Soft Computing, 12(6), 1621–1631. https://doi.org/10.1016/j.asoc.2012.03.013 [Google Scholar] [CrossRef]
10. Tajdin, A., Mahdavi, I., Mahdavi-Amiri, N., Sadeghpour-Gildeh, B. (2010). Computing a fuzzy shortest path in a network with mixed fuzzy arc lengths using
11. Dey, A., Pradhan, R., Pal, A., Pal, T. (2018). A genetic algorithm for solving fuzzy shortest path problems with interval type-2 fuzzy arc lengths. Malaysian Journal of Computer Science, 31(4), 255–270. https://doi.org/10.22452/mjcs [Google Scholar] [CrossRef]
12. Garg, H., Rawat, P. (2012). An improved algorithm for finding all pair shortest path. International Journal of Computer Applications, 47(25), 35–37. https://doi.org/10.5120/7539-0492 [Google Scholar] [CrossRef]
13. Shukla, K. T. (2013). Fuzzy floyd’s algorithm to find shortest route between nodes under uncertain environment. International Journal of Mathematics and Computer Applications Research, 3(5), 43–54. [Google Scholar]
14. Aziz, A., Farid, M. M., Suryani, E. (2017). Floyd warshall algorithm with FIS sugeno for search evacuation route optimization. International Seminar on Application for Technology of Information and Communication (iSemantic), pp. 147–151. Semarang, Indonesia. https://doi.org/10.1109/ISEMANTIC.2017.8251860 [Google Scholar] [CrossRef]
15. Shafahi, Y., Faturechi, R. (2009). A new fuzzy approach to estimate the O-D matrix from link volumes. Transportation Planning and Technology, 32(6), 499–526. https://doi.org/10.1080/03081060903374700 [Google Scholar] [CrossRef]
16. Broumi, S., Talea, M., Bakali, A., Smarandache, F., Nagarajan, D. et al. (2019). Shortest path problem in fuzzy, intuitionistic fuzzy and neutrosophic environment: An overview. Complex & Intelligent Systems, 5(4), 371–378. https://doi.org/10.1007/s40747-019-0098-z [Google Scholar] [CrossRef]
17. Akram, M., Habib, A., Alcantud, J. C. R. (2021). An optimization study based on dijkstra algorithm for a network with trapezoidal picture fuzzy numbers. Neural Computing and Applications, 33, 1329–1342. https://doi.org/10.1007/s00521-020-05034-y [Google Scholar] [CrossRef]
18. Akram, M., Shahzadi, G., Alcantud, J. C. R. (2022). Multi-attribute decision-making with q-rung picture fuzzy information. Granular Computing, 7, 197–215. https://doi.org/10.1007/s41066-021-00260-8 [Google Scholar] [CrossRef]
19. Akram, M., Bashir, A., Edalatpanah, S. A. (2021). A hybrid decision-making analysis under complex q-rung picture fuzzy einstein averaging operators. Computational and Applied Mathematics, 40(8), 1–35. https://doi.org/10.1007/s40314-021-01651-y [Google Scholar] [CrossRef]
20. Akram, M., Ullah, I., Allahviranloo, T. (2022). A new method to solve linear programming problems in the environment of picture fuzzy sets. Iranian Journal of Fuzzy Systems, 19(6), 29–49. https://doi.org/10.22111/ijfs.2022.7208 [Google Scholar] [CrossRef]
21. Thao, N. X. (2020). Similarity measures of picture fuzzy sets based on entropy and their application in MCDM. Pattern Analysis and Applications, 23(3), 1203–1213. https://doi.org/10.1007/s10044-019-00861-9 [Google Scholar] [CrossRef]
22. Mahmood, T., Ali, Z. (2020). The fuzzy cross-entropy for picture hesitant fuzzy sets and their application in multi citeria decision making. Punjab University Journal of Mathematics, 52(10), 55–82. ISSN 1016-2526. [Google Scholar]
23. Ganie, A. H., Singh, S., Bhatia, P. K. (2020). Some new correlation coefficients of picture fuzzy sets with applications. Neural Computing and Applications, 32(16), 12609–12625. https://doi.org/10.1007/s00521-020-04715-y [Google Scholar] [CrossRef]
24. Nirmani, A., Thilakarathne, L., Wickramasinghe, A., Senanayake, S., Haddela, P. S. (2018). Google map and camera based fuzzified adaptive networked traffic light handling model. 3rd International Conference on Information Technology Research (ICITR), pp. 1–6. Institute of Electrical and Electronics Engineers Inc., Moratuwa, Sri Lanka. https://doi.org/10.1109/ICITR.2018.8736158 [Google Scholar] [CrossRef]
25. Yue, Q. (2022). Bilateral matching decision-making for knowledge innovation management considering matching willingness in an interval intuitionistic fuzzy set environment. Journal of Innovation & Knowledge, 7(3), 100209. https://doi.org/10.1016/j.jik.2022.100209 [Google Scholar] [CrossRef]
26. Jiang, Z., Wei, G., Guo, Y. (2022). Picture fuzzy MABAC method based on prospect theory for multiple attribute group decision making and its application to suppliers selection. Journal of Intelligent & Fuzzy Systems, 42(4), 3405–3415. https://doi.org/10.3233/JIFS-211359 [Google Scholar] [CrossRef]
27. Habib, S., Akram, M., Al-Shamiri, M. M. A. (2023). Comparative analysis of pythagorean MCDM methods for the risk assessment of childhood cancer. Computer Modeling in Engineering & Sciences, 135(3), 2585–2615. https://doi.org/10.32604/cmes.2023.024551 [Google Scholar] [CrossRef]
28. Akram, M., Habib, A., Allahviranloo, T. (2022). A new maximal flow algorithm for solving optimization problems with linguistic capacities and flows. Information Sciences, 612, 201–230. https://doi.org/10.1016/j.ins.2022.08.068 [Google Scholar] [CrossRef]
29. Habib, A., Akram, M., Kahraman, C. (2022). Minimum spanning tree hierarchical clustering algorithm: A new pythagorean fuzzy similarity measure for the analysis of functional brain networks. Expert Systems with Applications, 201, 117016. https://doi.org/10.1016/j.eswa.2022.117016 [Google Scholar] [CrossRef]
30. Zhang, F., Zhao, Y., Ye, J., Wang, S., Hu, J. (2023). Novel distance measures on hesitant fuzzy sets based on equal-probability transformation and their application in decision making on intersection traffic control. Computer Modeling in Engineering & Sciences, 135(2), 1589–1602. https://doi.org/10.32604/cmes.2022.022431 [Google Scholar] [CrossRef]
31. Zhang, F., Xu, S., Han, B., Zhang, L., Ye, J. (2023). Neutrosophic adaptive clustering optimization in genetic algorithm and its application in cubic assignment problem. Computer Modeling in Engineering & Sciences, 134(3), 2211–2226. https://doi.org/10.32604/cmes.2022.022418 [Google Scholar] [CrossRef]
32. Yi, Y., Guan, Y. (2012). A path planning method to robot soccer based on dijkstra algorithm. In: Jin, D., Lin, S. (Eds.Advances in electronic commerce, web application and communication, pp. 89–95. https://doi.org/10.1007/978-3-642-28658-2_14 [Google Scholar] [CrossRef]
33. Zadeh, L. A. (1975). The concept of a linguistic variable and its application to approximate reasoning–I. Information Sciences, 8(3), 199–249. https://doi.org/10.1016/0020-0255(75)90036-5 [Google Scholar] [CrossRef]
34. Zulqarnain, R. M., Siddique, I., Iampan, A., Baleanu, D. (2022). Aggregation operators for interval-valued pythagorean fuzzy soft set with their application to solve multi-attribute group decision making problem. Computer Modeling in Engineering & Sciences, 131(3), 1717–1750. https://doi.org/10.32604/cmes.2022.019408 [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools