
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE

3D Vehicle Detection Algorithm Based on Multimodal Decision-Level Fusion
1 School of Mechanical Engineering, Anhui Polytechnic University, Wuhu, 241000, China
2 Department Polytechnic Institute of Zhejiang University, Hangzhou, 310000, China
* Corresponding Author: Peicheng Shi. Email:
Computer Modeling in Engineering & Sciences 2023, 135(3), 2007-2023. https://doi.org/10.32604/cmes.2023.022304
Received 03 March 2022; Accepted 01 August 2022; Issue published 23 November 2022
 View Full Text
View Full Text Download PDF
Download PDFAbstract
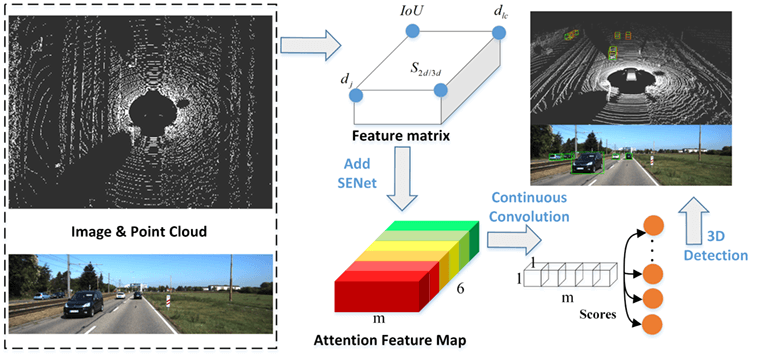
3D vehicle detection based on LiDAR-camera fusion is becoming an emerging research topic in autonomous driving. The algorithm based on the Camera-LiDAR object candidate fusion method (CLOCs) is currently considered to be a more effective decision-level fusion algorithm, but it does not fully utilize the extracted features of 3D and 2D. Therefore, we proposed a 3D vehicle detection algorithm based on multimodal decision-level fusion. First, project the anchor point of the 3D detection bounding box into the 2D image, calculate the distance between 2D and 3D anchor points, and use this distance as a new fusion feature to enhance the feature redundancy of the network. Subsequently, add an attention module: squeeze-and-excitation networks, weight each feature channel to enhance the important features of the network, and suppress useless features. The experimental results show that the mean average precision of the algorithm in the KITTI dataset is 82.96%, which outperforms previous state-of-the-art multimodal fusion-based methods, and the average accuracy in the Easy, Moderate and Hard evaluation indicators reaches 88.96%, 82.60%, and 77.31%, respectively, which are higher compared to the original CLOCs model by 1.02%, 2.29%, and 0.41%, respectively. Compared with the original CLOCs algorithm, our algorithm has higher accuracy and better performance in 3D vehicle detection.Graphic Abstract
Keywords
3D vehicle detection; multimodal fusion; CLOCs; network structure optimization; attention module
Cite This Article
APA Style
Shi, P., Qi, H., Liu, Z., Yang, A. (2023). 3D Vehicle Detection Algorithm Based on Multimodal Decision-Level Fusion. Computer Modeling in Engineering & Sciences, 135(3), 2007–2023. https://doi.org/10.32604/cmes.2023.022304
Vancouver Style
Shi P, Qi H, Liu Z, Yang A. 3D Vehicle Detection Algorithm Based on Multimodal Decision-Level Fusion. Comput Model Eng Sci. 2023;135(3):2007–2023. https://doi.org/10.32604/cmes.2023.022304
IEEE Style
P. Shi, H. Qi, Z. Liu, and A. Yang, “3D Vehicle Detection Algorithm Based on Multimodal Decision-Level Fusion,” Comput. Model. Eng. Sci., vol. 135, no. 3, pp. 2007–2023, 2023. https://doi.org/10.32604/cmes.2023.022304
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools