
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
Research on Flexible Job Shop Scheduling Optimization Based on Segmented AGV
1 College of Mechanical and Electrical Engineering, Harbin Engineering University, Harbin, 150001, China
2 Carrier Platform Division, Beijing Research Institute of Special Mechanic, Beijing, 100143, China
* Corresponding Author: Nengjian Wang. Email:
(This article belongs to the Special Issue: Computer Modeling in Ocean Engineering Structure and Mechanical Equipment)
Computer Modeling in Engineering & Sciences 2023, 134(3), 2073-2091. https://doi.org/10.32604/cmes.2022.021433
Received 14 January 2022; Accepted 04 May 2022; Issue published 20 September 2022
 View Full Text
View Full Text Download PDF
Download PDFAbstract
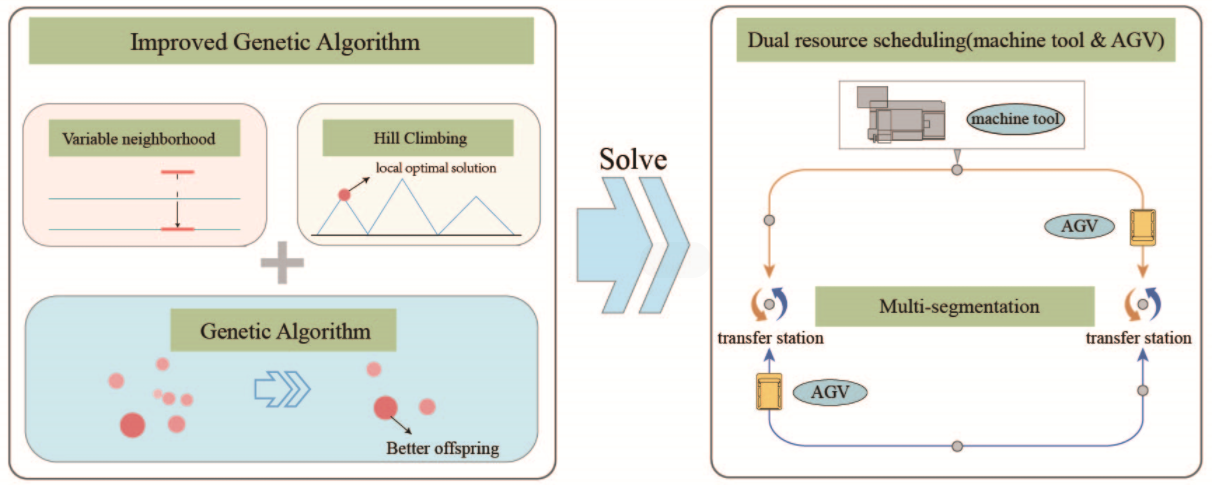
As a typical transportation tool in the intelligent manufacturing system, Automatic Guided Vehicle (AGV) plays an indispensable role in the automatic production process of the workshop. Therefore, integrating AGV resources into production scheduling has become a research hotspot. For the scheduling problem of the flexible job shop adopting segmented AGV, a dual-resource scheduling optimization mathematical model of machine tools and AGVs is established by minimizing the maximum completion time as the objective function, and an improved genetic algorithm is designed to solve the problem in this study. The algorithm designs a two-layer coding method based on process coding and machine tool coding and embeds the task allocation of AGV into the decoding process to realize the real dual resource integrated scheduling. When initializing the population, three strategies are designed to ensure the diversity of the population. In order to improve the local search ability and the quality of the solution of the genetic algorithm, three neighborhood structures are designed for variable neighborhood search. The superiority of the improved genetic algorithm and the influence of the location and number of transfer stations on scheduling results are verified in two cases.Graphic Abstract
Keywords
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools