
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
High-Precision Time Delay Estimation Based on Closed-Form Offset Compensation
1 The Key Laboratory of Dynamic Cognitive System of Electromagnetic Spectrum Space, Ministry of Industry and Information Technology, Nanjing University of Aeronautics and Astronautics, Nanjing, 211106, China
2 State Key Laboratory of Marine Resource Utilization in South China Sea, Hainan University, Haikou, 570100, China
* Corresponding Author: Jianfeng Li. Email:
(This article belongs to the Special Issue: AI-Driven Intelligent Sensor Networks: Key Enabling Theories, Architectures, Modeling, and Techniques)
Computer Modeling in Engineering & Sciences 2023, 134(3), 2123-2136. https://doi.org/10.32604/cmes.2022.021407
Received 12 January 2022; Accepted 07 April 2022; Issue published 20 September 2022
 View Full Text
View Full Text Download PDF
Download PDFAbstract
To improve the estimation accuracy, a novel time delay estimation (TDE) method based on the closed-form offset compensation is proposed. Firstly, we use the generalized cross-correlation with phase transform (GCC-PHAT) method to obtain the initial TDE. Secondly, a signal model using normalized cross spectrum is established, and the noise subspace is extracted by eigenvalue decomposition (EVD) of covariance matrix. Using the orthogonal relation between the steering vector and the noise subspace, the first-order Taylor expansion is carried out on the steering vector reconstructed by the initial TDE. Finally, the offsets are compensated via simple least squares (LS). Compared to other state-of-the-art methods, the proposed method significantly reduces the computational complexity and achieves better estimation performance. Experiments on both simulation and real-world data verify the efficiency of the proposed approach.Keywords
The time delay estimation (TDE) is a key issue of the time difference of arrival (TDOA) method [1–3], which plays a crucial role in passive localization positioning, navigation, wireless communication, electronic countermeasures and wireless sensor networks, etc. [4–11]. In the field of positioning, TDOA-based method locates the source by estimating the time difference among different nodes arriving at the target, which avoids the requirement for node sensor clocks to be synchronized with the target in the TOA method [12–14]. Obviously, the TDE directly affects the performance of positioning. Hence, it is of great concern to study high accurate TDE methods.
Generalized cross correlation (GCC) [15–17] is a classical approach for TDE, it applies a weighting function to the cross-power spectrum to improve the signal-to-noise ratio (SNR) and thus sharpen the peak of the correlation function. In various GCC methods, the GCC with phase transform (GCC-PHAT) method can make the TDE robust against noise and reverberation and thus has better performance than others [18–20]. On the strength of the GCC, some new methods have been proposed for high-precision TDE. A closed-form maximum-likelihood cross-phase spectrum estimation method for GCC is proposed in [21], which corrects the phase bias by noise coherence function to obtain accurate TDE. The paper in [22] extracts GCCs based on the sliding-window method and uses sub-band GCC to represent the corresponding cross-power spectrum phase, but the temporal resolution is reduced. Based on GCC-PHAT, the ‘inversed’ diffuseness is binarized with a strict threshold, which masks the time-frequency components of observed signals to obtain reliable TDE [23]. However, these methods fail to address the problem of the limited resolution, and the fact that the calculated TDE is always integer multiple of the sampling period. A self-delay-compensation (SDC) method is proposed to solve this problem in [24]. By adding a tiny time delay unit, this method makes up the neglectful time delay within a sampling interval. In addition, some super-resolution TDE methods are proposed to overcome the limited sampling period. Utilizing sinusoidal signal frequency estimation model, Ge et al. [25] constructs covariance matrix through signal correlation, and adopts multiple signal classification (MUSIC) algorithm for TDE. But it needs to estimate the power spectrum density of the unknown signal at first. A super-resolution method using normalized cross spectrum is proposed to estimate time delay in [26], which makes the feature structure of signal normalized cross spectrum to deduce a new TDE model. Compared with [25], it avoids estimating the power spectrum of unknown signals and reduces the amount of computation. Nevertheless, the above methods belong to subspace-based algorithms, and they inevitably suffer from high computational complexity due to eigenvalue decomposition (EVD) and spectral peak search.
In this paper, we propose an efficient TDE method for TDOA-based passive localization, which overcomes the problem of limited sampling intervals. The contributions of our work are summarized as follows:
(1) Based on the first-order Taylor expansion on the vector containing initial TDEs, high accurate time delays are estimated by adding closed-form offset compensation obtained via least squares (LS).
(2) Theoretical analysis and simulation experiments are conducted, which demonstrate that the proposed method has lower computational complexity and more accurate estimation compared with SDC [24] and MUSIC [26] methods.
(3) Experiments on real-world scenarios demonstrate that the proposed method significantly improves the performance of source localization.
Notation: Vectors are represented by lowercase bold characters and matrices by uppercase bold characters.
To better explain the TDOA localization principle, Fig. 1 presents a passive positioning system with multi-nodes. There are
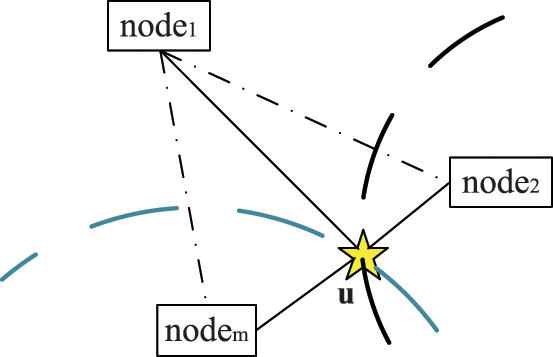
Figure 1: TDOA positioning system based on multi-nodes
Suppose that
where
Just like the system model introduced above, a passive positioning system is composed of
3.1 The Initial TDE Based on GCC
Generally, the received signal at first node
where
Assuming that
According to Wiener-Khinchin theorem, the discrete Fourier transform (DFT) of the correlation function is the corresponding power spectrum. In the GCC method, the received signal is weighted in frequency domain to enhance the frequency component with high SNR and suppress the noise power. Here the PHAT is chosen due to its robustness, whose weighting function is
where
Therefore, the initial TDEs are obtained by Eq. (7). However, the resolution of this method is limited by sampling period. In fact, we can estimate time delay by the subspace method which can break through the restriction of sampling period. The super-resolution method using normalized cross spectrum in [26] derives the orthogonal formula containing initial delay, and no relevant transcendental knowledge is needed.
Using the signal model shown in Eq. (3) above, on the assumption that the signal is not correlated with the noise, the autocorrelation function of the reference signal
where
where
The cross-power spectrum of the two observed signals has the following relationship with the power spectrum of
Using
where
where
where
where
It can be seen that the normalized cross-power spectrum model is equivalent to the parametric model of line spectra. Therefore, the method of super-resolution spectrum estimation can be applied to estimate the time delay, such as MUSIC algorithm. The covariance matrix of
It can be divided into signal subspace
where,
According to the orthogonal relation, the spectral function of time delay estimation is obtained
Then
As a matter of fact, the subspace-based TDE methods need a wide time frame search, while direction of arrival (DOA) estimation only requires an angle search of
3.3 Closed-Form Offset Compensation
Since the GCC method cannot overcome the limitation that the resolution is the sampling period, the time delay
Next, we apply the first order Taylor expansion to
where
The offset
By compensating offset
In most cases, iterations are necessary during Taylor expansion method implementation. Fig. 2 depicts the iterative process of the proposed method in detail. The number of iterations is indicated by i, whose value is determined by the residual. For example, if the compensation value approaches zero, the iteration should be stopped at this time. After iteration, high-precision TDE can be obtained. Furthermore, the complexity of this method after iteration is also low, as will be discussed in detail below.
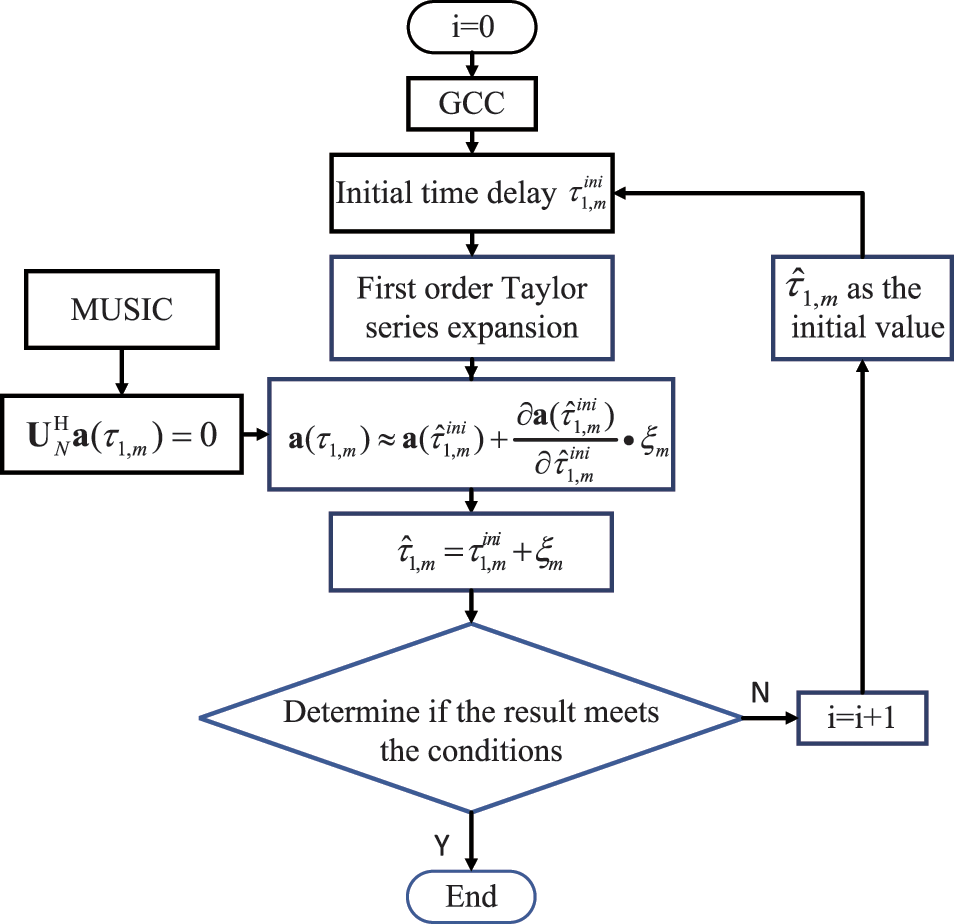
Figure 2: Flow chart of the proposed method with iterations
Then we list the corresponding hyperbolic equations after acquiring more accurate TDEs based on Eq. (23) via
where c is the wave propagation speed. It is well known that the Chan algorithm [27] tends to be affected by the accuracy of TDEs, we can derive an optimal location estimation based on the improvement of TDEs.
Generally, the method in this paper mainly includes the following steps:
1) Select the received signal
2) The TDE model is derived from the normalized cross-power spectrum of observed signals as Eq. (14), and the corresponding noise subspace
3) According to the orthogonal relation of
4) Calculate the fine time delay estimations
This section is presented to discuss the computational complexity of different methods. The computation cost of GCC-PHAT is about
Fig. 3 demonstrates computational complexities comparison among the GCC-PHAT, SDC, MUSIC, and proposed method under the condition that
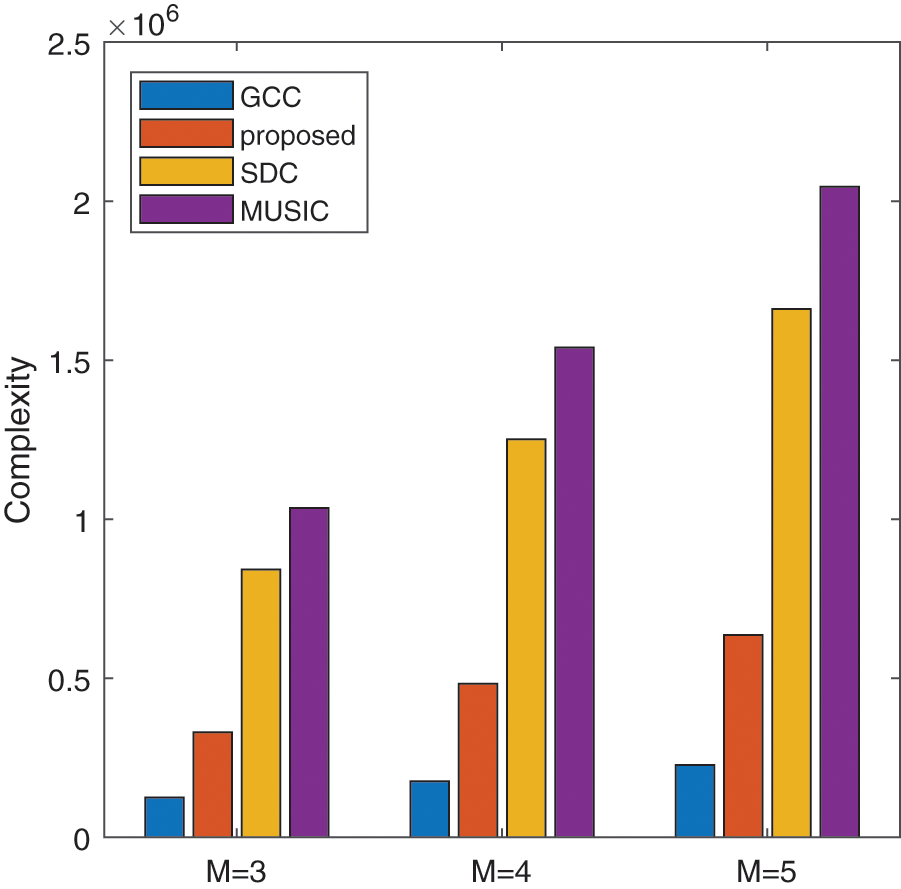
Figure 3: The comparison of complexity among different methods
This part mainly presents simulation experiments to test the methods. Assuming that the nodes number is
where K is Monte-Carlo simulation times,
Fig. 4 illustrates the RMSE performances of the TDE algorithms vs. SNR, including the GCC, MUSIC, SDC, and the proposed method. Experiments are conducted with the setting sampling frequency
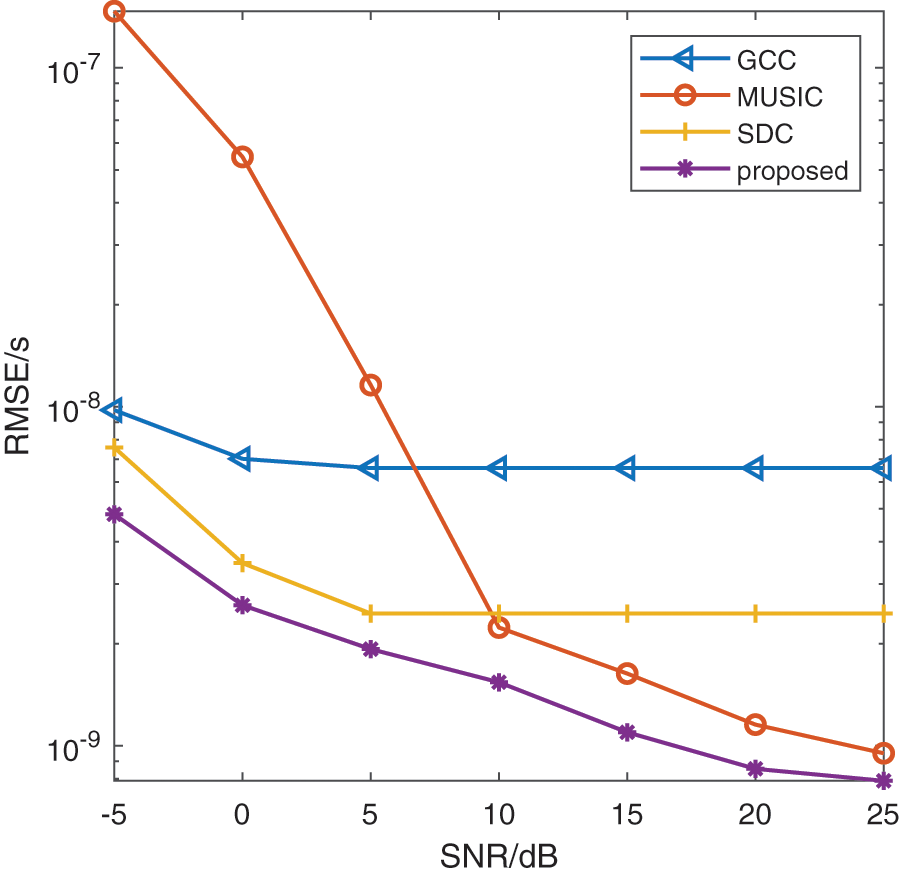
Figure 4: TDE performance comparison versus SNR
Meanwhile, the time delay estimation comparison of different methods between signal source arrival at
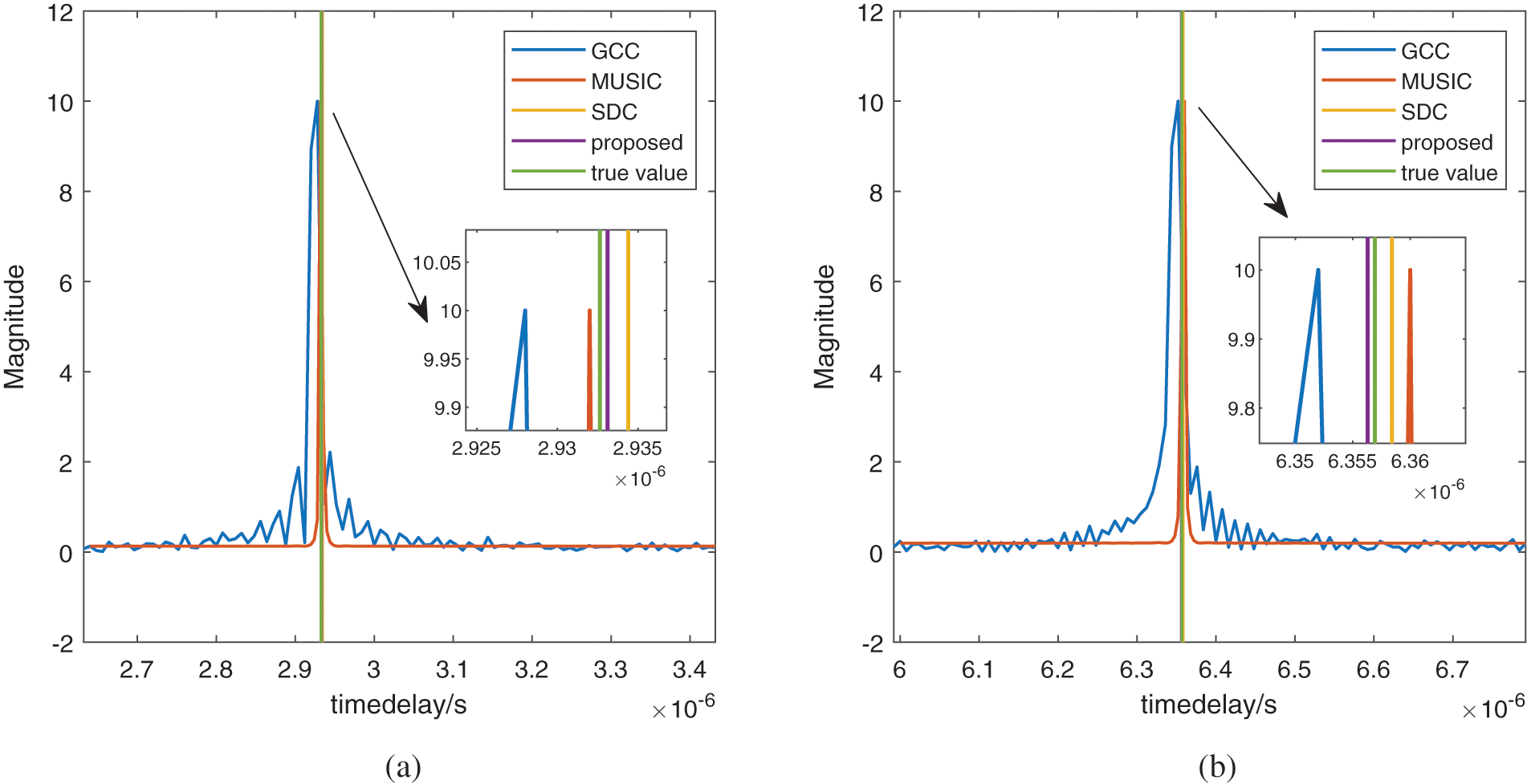
Figure 5: Time delay estimation comparison of different methods (a) Time delay
In this paper, the measured data collected in real-world experiments is used to further prove the validity of the proposed method. As shown in Fig. 6, there are three anchors in the campus namely anchor 1, anchor 2, and anchor 3, and the source is placed at the playground. In the experiment, the source transmits signals of various frequencies and modulation modes, which are received by the anchors. The computer remotely connects the three anchors to convert the collected data into the common Excel type for convenient data reading.
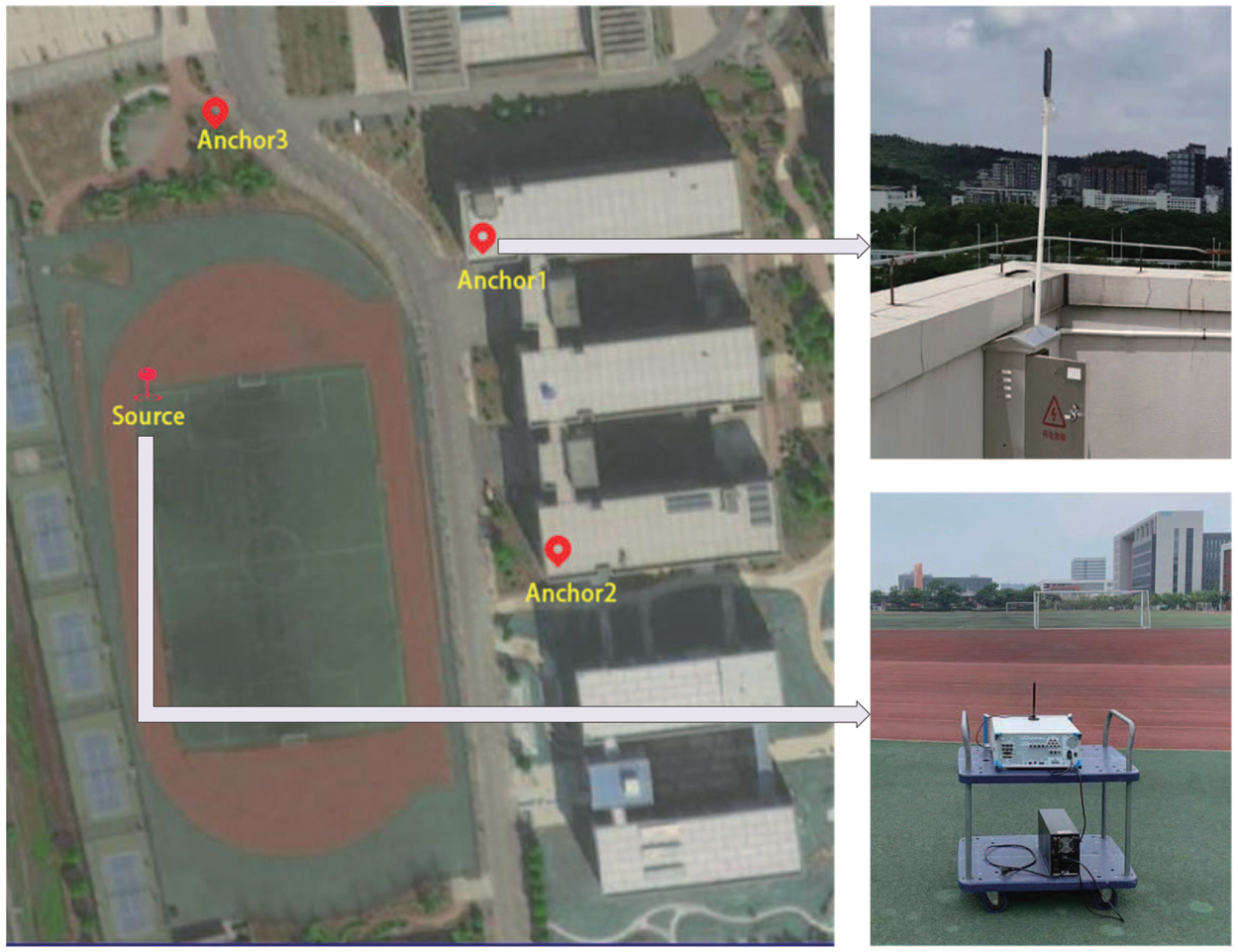
Figure 6: Actual test scenario of source and three anchors
To process the collected measured data, we choose anchor 3 as the reference anchor, and then estimate the time differences among the signal radiation reaching the anchor 3 and others. The radiation source is a wideband signal modulated by QPSK, the center frequency is 700 MHz with 30 MHz bandwidth, and the sampling frequency is
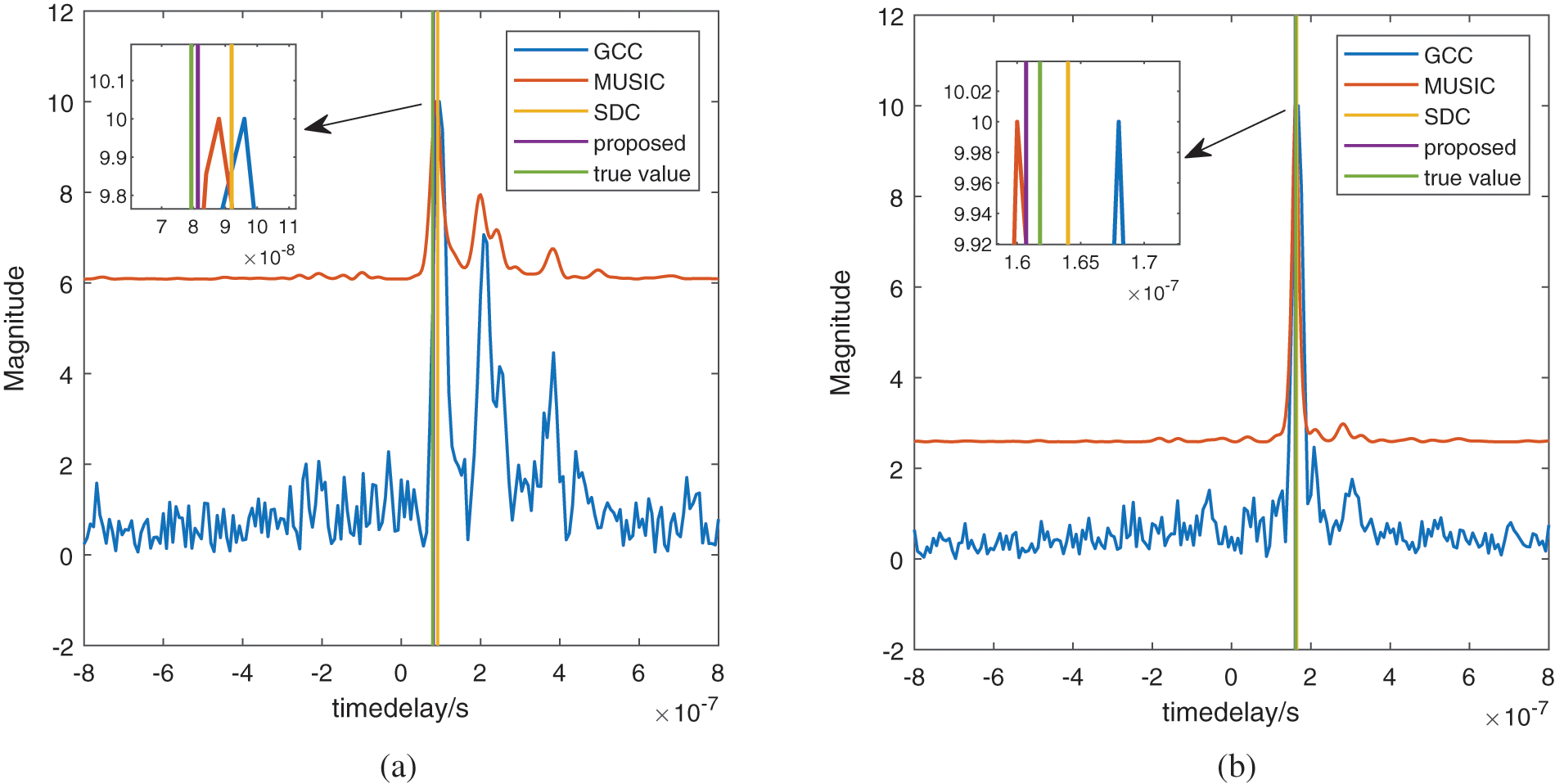
Figure 7: The TDEs based on measured data (a) Time delay
Fig. 8 is a coordinate chart of the positioning result. We choose anchor 3 as the reference origin to establish a two-dimensional coordinate system. The Chan algorithm [27] is used to locate the estimated signal source based on the time delay processed by the measured data. The red five-pointed star in the figure represents the actual source location, and the blue triangle represents the estimated source position based on the approach proposed in this paper. As is demonstrated from Fig. 8 that the two signs are very close to each other, indicating that the proposed method is practical.
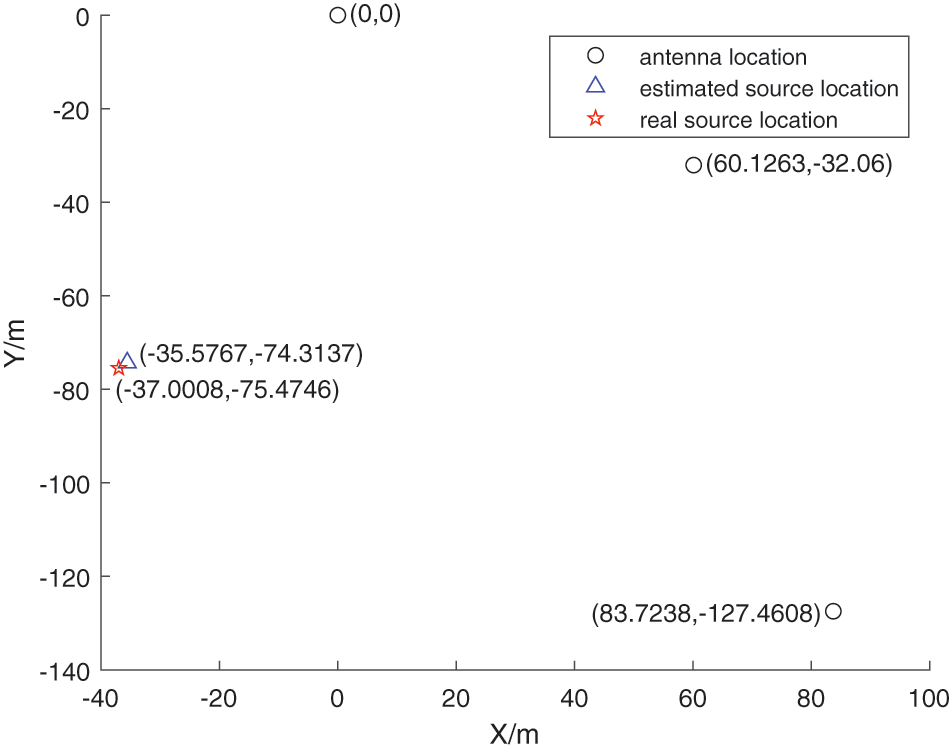
Figure 8: Actual test scenario of source and three anchors
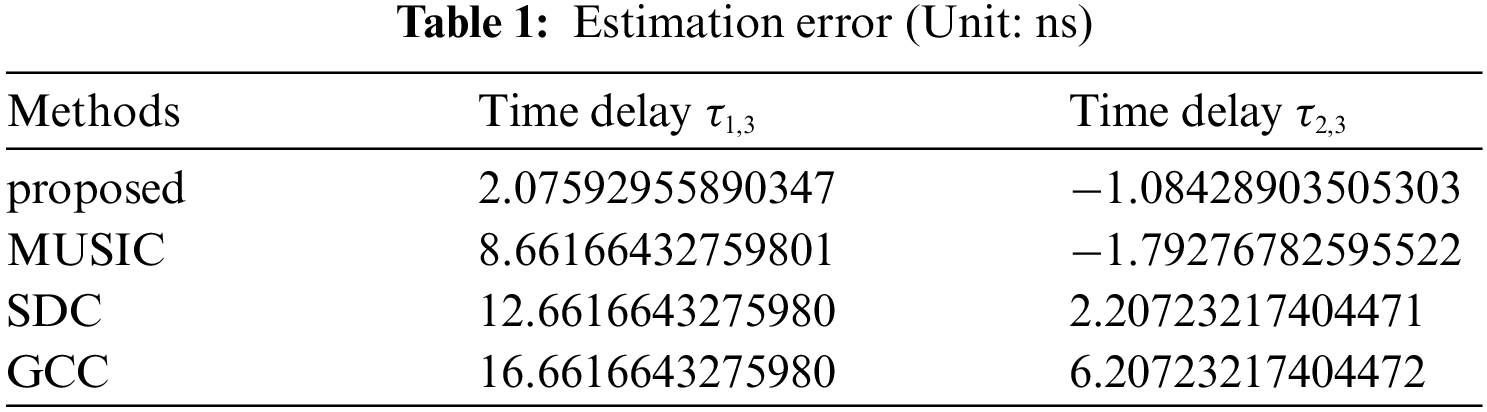
Table 1 shows the time delay estimation errors of the four methods among reference node and other nodes. It can be seen that the TDE performance of the method proposed in this paper is closer to the actual time delay compared with other methods.
This paper presents a high precision TDE method based on closed-form offset compensation. The initial TDEs are estimated by the GCC method. Then we make use of the orthogonality of the noise subspace and the delay vector to obtain equation. To compensate the error caused by limited resolution in GCC, the first-order Taylor expansion is considered. The improved estimations are achieved by adding closed-form offsets, which can be computed by simple LS. Simulation experiments show that our method offers more accurate TDE results as well as lower computational complexity. Finally, we make experiments under the real field condition, which demonstrates that our method provides high-precision TDE.
Acknowledgement: The authors would like to thank the editor of this article and the anonymous reviewer for their valuable suggestions and comments which greatly improved the presentation of this paper.
Funding Statement: This work was supported in part by National Key R&D Program of China under Grants 2020YFB1807602 and 2020YFB1807600, National Science Foundation of China (61971217, 61971218, 61631020, 61601167), the Fund of Sonar Technology Key Laboratory (Range estimation and location technology of passive target via multiple array combination), Jiangsu Planned Projects for Postdoctoral Research Funds (2020Z013), China Postdoctoral Science Foundation (2020M681585).
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. Delcourt, M., Le Boudec, J. Y. (2021). Tdoa source-localization technique robust to time-synchronization attacks. IEEE Transactions on Information Forensics and Security, 16, 4249–4264. DOI 10.1109/TIFS.2020.3001741. [Google Scholar] [CrossRef]
2. Chen, X., Wang, D., Yin, J., Wu, Y. (2018). Performance analysis and dimension-reduction taylor series algorithms for locating multiple disjoint sources based on tdoa under synchronization clock bias. IEEE Access, 6, 48489–48509. DOI 10.1109/ACCESS.2018.2860958. [Google Scholar] [CrossRef]
3. Zekavat, R., Buehrer, R. M. (2019). Source localization: Algorithms and analysis. In: Handbook of position location: Theory, practice, and advances, pp. 59–106. Wiley, New Jersey, USA. [Google Scholar]
4. Xiong, H., Chen, Z. Y., Yang, B. Y., Ni, R. P. (2015). Tdoa localization algorithm with compensation of clock offset for wireless sensor networks. China Communications, 12(10), 193–201. DOI 10.1109/CC.2015.7315070. [Google Scholar] [CrossRef]
5. Hemavathy, P. R., Shuaib, Y. M., Lakshmanaprabu, S. K. (2019). Design of smith predictor based fractional controller for higher order time delay process. Computer Modeling in Engineering & Sciences, 119(3), 481–498. DOI 10.32604/cmes.2019.04731. [Google Scholar] [CrossRef]
6. Wang, H., Li, X. W., Jhaveri, R. H., Gadekallu, T. R., Zhu, M. F. et al. (2021). Sparse bayesian learning based channel estimation in FBMC/OQAM industrial IoT networks. Computer Communications, 176, 40–45. DOI 10.1016/j.comcom.2021.05.020. [Google Scholar] [CrossRef]
7. Wen, F. Q., Shi, J. P., Zhang, Z. J. (2022). Generalized spatial smoothing in bistatic EMVS-MIMO radar. Signal Processing, 193, 108406. DOI 10.1016/j.sigpro.2021.108406. [Google Scholar] [CrossRef]
8. Wang, H., Xu, L. W., Yan, Z. Q., Gulliver, T. A. (2021). Low-complexity MIMO-FBMC sparse channel parameter estimation for industrial big data communications. IEEE Transactions on Industrial Informatics, 17(5), 3422–3430. DOI 10.1109/TII.9424. [Google Scholar] [CrossRef]
9. Chen, H., Ballal, T., Saeed, N., Alouini, M. S., Al-Naffouri, T. Y. (2020). A joint TDOA-PDOA localization approach using particle swarm optimization. IEEE Wireless Communications Letters, 9(8), 1240–1244. DOI 10.1109/LWC.5962382. [Google Scholar] [CrossRef]
10. Zhu, Y. T., Dong, C. X., Liu, S. Y., Dong, Y. Y., Zhao, G. Q. (2016). Passive localization using retransmitted TDOA measurements in the presence of sensor position errors. Acta Aeronautica et Astronautica Sinica, 37(2), 706–716. DOI 10.7527/S1000-6893.2015.0203. [Google Scholar] [CrossRef]
11. Hao, W., Cheng, C., Mo, D. E. A. (2020). Phase tracking approach for TDOA measurements in critical lunar spaceflights. Science China Information Sciences, 63(2), 235--237. DOI 10.1007/s11432-018-9812-x. [Google Scholar] [CrossRef]
12. Zhang, L., Zhang, T., Shin, H. S. (2021). An efficient constrained weighted least squares method with bias reduction for TDOA-based localization. IEEE Sensors Journal, 21(8), 10122–10131. [Google Scholar]
13. Li, X., Zhang, X. Y., Yu, X., Hu, Y. P. (2013). Modified cramer-rao bound for relative location estimation. Journal of Data Acquisition & Processing, 28(2), 195–200. DOI 10.3969/j.issn.1004-9037.2013.02.013. [Google Scholar] [CrossRef]
14. Deng, Z. L., Wang, H. H., Zheng, X. Y., Fu, X., Yin, L. (2019). A closed-form localization algorithm and GDOP analysis for multiple TDOAs and single TOA based hybrid positioning. Applied Sciences, 9(22), 4935. DOI 10.3390/app9224935. [Google Scholar] [CrossRef]
15. Knapp, C., Carter, G. (1976). The generalized correlation method for estimation of time delay. IEEE Transactions on Acoustics, Speech, and Signal Processing, 24(4), 320–327. DOI 10.1109/TASSP.1976.1162830. [Google Scholar] [CrossRef]
16. Wang, J., Yang, J. S. (2008). The research of time delay estimation method of general cross correlation with frequency difference. Signal Processing, 24(1), 112–114. DOI 10.3969/j.issn.1003-0530.2008.01.026. [Google Scholar] [CrossRef]
17. Ding, C., Chen, Z., Zhang, Z. T., Cheng, Y. S. (2021). Time delay estimation using cross-power spectrum phase. Journal of Electronics & Information Technology, 43(3), 803–808. DOI 10.11999/JEIT200584. [Google Scholar] [CrossRef]
18. Kim, U. H., Nakadai, K., Okuno, H. G. (2015). Improved sound source localization in horizontal plane for binaural robot audition. Applied Intelligence, 42(1), 63–74. DOI 10.1007/s10489-014-0544-y. [Google Scholar] [CrossRef]
19. Villadangos, J. M., Urena, J., Garcia-Dominguez, J. J., Jimenez-Martin, A., Hernandez, A. et al. (2021). Dynamic adjustment of weighted GCC-PHAT for position estimation in an ultrasonic local positioning system. Sensors, 21(21), 7051. DOI 10.3390/s21217051. [Google Scholar] [CrossRef]
20. Padois, T., Doutres, O., Sgard, F. (2019). On the use of modified phase transform weighting functions for acoustic imaging with the generalized cross correlation. Journal of the Acoustical Society of America, 145(3), 1546–1555. DOI 10.1121/1.5094419. [Google Scholar] [CrossRef]
21. Li, X. L. (2021). On correcting the phase bias of GCC in spatially correlated noise fields. Signal Processing, 180, 107859. DOI 10.1016/j.sigpro.2020.107859. [Google Scholar] [CrossRef]
22. Cobos, M., Antonacci, F., Comanducci, L., Sarti, A. (2020). Frequency-sliding generalized cross-correlation: A sub-band time delay estimation approach. IEEE/ACM Transactions on Audio, Speech, and Language Processing, 28, 1270–1281. DOI 10.1109/TASLP.6570655. [Google Scholar] [CrossRef]
23. Lee, R., Kang, M., Kim, B., Park, K., Lee, S. Q. et al. (2020). Sound source localization based on GCC-PHAT with diffuseness mask in noisy and reverberant environments. IEEE Access, 8, 7373–7382. [Google Scholar]
24. He, Y., Li, J., Zhang, X. (2020). Adaptive cascaded high-resolution source localization based on collaboration of multi-UAVs. China Communications, 17(4), 165–179. [Google Scholar]
25. Ge, F. X., Shen, D., Peng, Y., Li, V. O. K. (2007). Super-resolution time delay estimation in multipath environments. IEEE Transactions on Circuits and Systems I: Regular Papers, 54(9), 1977–1986. DOI 10.1109/TCSI.2007.904693. [Google Scholar] [CrossRef]
26. Zhong, S., Xia, W., Song, J., He, Z. (2013). Super-resolution time delay estimation in multipath environments using normalized cross spectrum. 2013 International Conference on Communications, Circuits and Systems (ICCCAS), pp. 288–291. Chengdu, China. DOI 10.1109/ICCCAS.2013.6765235. [Google Scholar] [CrossRef]
27. Yan, X. P., Zhang, Z. W., Wang, H. P. (2021). Application of Chan algorithm in marine sound source localization. Technical Acoustics, 40(4), 550–555. DOI 10.16300/j.cnki.1000-3630.2021.04.018. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools