
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
Nonlinear Electrical Impedance Tomography Method Using a Complete Electrode Model for the Characterization of Heterogeneous Domains
Department of Civil and Environmental Engineering, Hongik University, Seoul, 04066, Korea
* Corresponding Author: Jun Won Kang. Email:
Computer Modeling in Engineering & Sciences 2023, 134(3), 1707-1735. https://doi.org/10.32604/cmes.2022.020926
Received 20 December 2021; Accepted 11 May 2022; Issue published 20 September 2022
 View Full Text
View Full Text Download PDF
Download PDFAbstract
This paper presents an electrical impedance tomography (EIT) method using a partial-differential-equation-constrained optimization approach. The forward problem in the inversion framework is described by a complete electrode model (CEM), which seeks the electric potential within the domain and at surface electrodes considering the contact impedance between them. The finite element solution of the electric potential has been validated using a commercial code. The inverse medium problem for reconstructing the unknown electrical conductivity profile is formulated as an optimization problem constrained by the CEM. The method seeks the optimal solution of the domain’s electrical conductivity to minimize a Lagrangian functional consisting of a least-squares objective functional and a regularization term. Enforcing the stationarity of the Lagrangian leads to state, adjoint, and control problems, which constitute the Karush-Kuhn-Tucker (KKT) first-order optimality conditions. Subsequently, the electrical conductivity profile of the domain is iteratively updated by solving the KKT conditions in the reduced space of the control variable. Numerical results show that the relative error of the measured and calculated electric potentials after the inversion is less than 1%, demonstrating the successful reconstruction of heterogeneous electrical conductivity profiles using the proposed EIT method. This method thus represents an application framework for nondestructive evaluation of structures and geotechnical site characterization.Keywords
Electrical impedance tomography (EIT) is a nondestructive evaluation method that infers the electrical conductivity, permittivity, or impedance of structures using the surficial measurement of electrical responses due to currents. The method seeks to construct a tomographic image of an object by estimating the spatial distribution of its impedance or electrical conductivity. EIT has been recognized as a highly applicable technique in medical imaging, industrial process monitoring, and near-surface site characterization due to its ease of field experimentation, economic feasibility, and superior ability to penetrate structures. When a structure experiences electric potential difference, current flows from the point of high potential to the point of low potential. In other words, when the electric current is input to a structure, electric potential distribution is formed within the structure and on its boundary. If a structure is heterogeneous, the path of electric current is different from the homogeneous case. Therefore, the electric potential distribution of a structure depends on its material heterogeneity [1,2].
The problem of reconstructing the material properties of a structure using the measured electrical response from the surface can be defined as an inverse medium problem. Many mathematical algorithms and numerical strategies have been proposed to improve the solution to this problem. For example, mathematical and statistical regularization methods have been proposed to relieve the ill-posedness of the inverse problem and improve the solution convergence [3–6]. Representative methods for solving the nonlinear EIT problem include the back-projection method [7], one-step Newton method [8], D-bar method [9], and block method [10]. Recent studies have also investigated combining the EIT technique with neural networks to improve the accuracy of the tomographic image reconstruction of structures [11]. Such developments have been primarily applied to medical imaging for cancer detection and brain activity imaging. In civil engineering, research on the feasibility of applying the EIT to structural condition assessment or site characterization has been increasing recently. Recent applications of the EIT to civil structures include crack detection in pipes buried in the ground [12], ground saturation monitoring, and damage detection in carbon fiber-reinforced polymer (CFRP) materials [13]. To successfully implement the EIT, it is essential to have an efficient and accurate forward solver. In civil engineering applications, however, ensuring the accuracy of the forward solution remains a challenge because of the wide range of material properties, scales, and contact impedance between electrodes and structures.
For improving the previous development of the EIT for civil structures, this study proposes a nonlinear inversion method using a complete electrode model (CEM), targeting the reconstruction of the electrical conductivity profile of heterogeneous domains. The CEM comprises the Laplace equation for electric potential and the boundary conditions that express the current input to the structure via surface electrodes [14–16]. Because the CEM enables the realistic modeling of the interface between the structure and electrodes, accurate solutions of the electric potential in the structural medium and the electrodes are expected. The forward solution generated by the CEM is used within the nonlinear inversion framework for reconstructing the electrical conductivity profile of structures. Specifically, the inverse problem is resolved using a partial differential equation (PDE)-constrained optimization approach. This approach seeks the optimal solution of the medium’s electrical conductivity to minimize a Lagrangian, which comprises a least-squares objective functional augmented by the weak imposition of the governing PDE and boundary conditions from the CEM. Enforcing the stationarity of the Lagrangian leads to state, adjoint, and control problems, which constitute the Karush-Kuhn-Tucker (KKT) optimality conditions. They are the first-order optimality conditions resulting from the first variation of the Lagrangian with respect to state, adjoint, and control variables. The electrical conductivity profile of the domain is then iteratively updated by solving the KKT conditions in the reduced space of the control variable. A conjugate gradient method with an inexact line search is used for the iterative solution of the electrical conductivity. To the best of the authors’ knowledge, the EIT method based on the PDE-constrained optimization using the CEM and KKT conditions has been presented for the first time. The proposed inverse EIT problem deals with the Laplace equation, Robin, and Neumann boundary conditions in the PDE-constrained optimization. There are similar EIT approaches developed so far, but they mostly deal with Neumann or Dirichlet boundary conditions to solve the forward problem [17–19]. Some recent studies have included the Robin boundary condition to reflect the contact impedance between the domain and electrode boundaries, but their inverse formulation and optimization schemes are different from the present study [20,21].
The remainder of this paper is organized as follows: In Section 2, the forward problem described by the CEM is presented. In Section 3, the formulation of the electrostatic inverse medium problem is presented using the Lagrangian functional and the first-order optimality conditions. In Section 4, the inversion process used to iteratively update the electrical conductivity profile in the reduced space is described. Section 5 discusses numerical examples for a series of cases in which homogeneous and heterogeneous electrical conductivity profiles are reconstructed. Finally, Section 6 presents the conclusions of the study. Finite differences for a non-unifrom grid are well shown in Figs. A1–A3.
2.1 Problem Statement Using the Complete Electrode Model
To solve the inverse medium problem using measured electric potential values, it is first necessary to resolve the electrostatic forward problem for calculating the electric potential due to the current input. This study uses the CEM as a mathematical model for the forward problem. The CEM accounts for the current loss that occurs when the current flows to a low impedance material through an electrode and the voltage drops due to the contact impedance between the structural surface and electrode [14,22]. The current loss and voltage drop influence the measured electric potential values detected by the electrodes. As the CEM considers both the contact impedance and current loss at the electrodes, the error between the calculated electric potential and the experimentally derived electric potential is generally smaller than that computed using other models. Fig. 1 schematically shows a circular structure with electrodes on its surface. Solving the forward problem using the CEM reveals the electric potential inside the structure and that at the electrodes due to the current input through the electrodes.
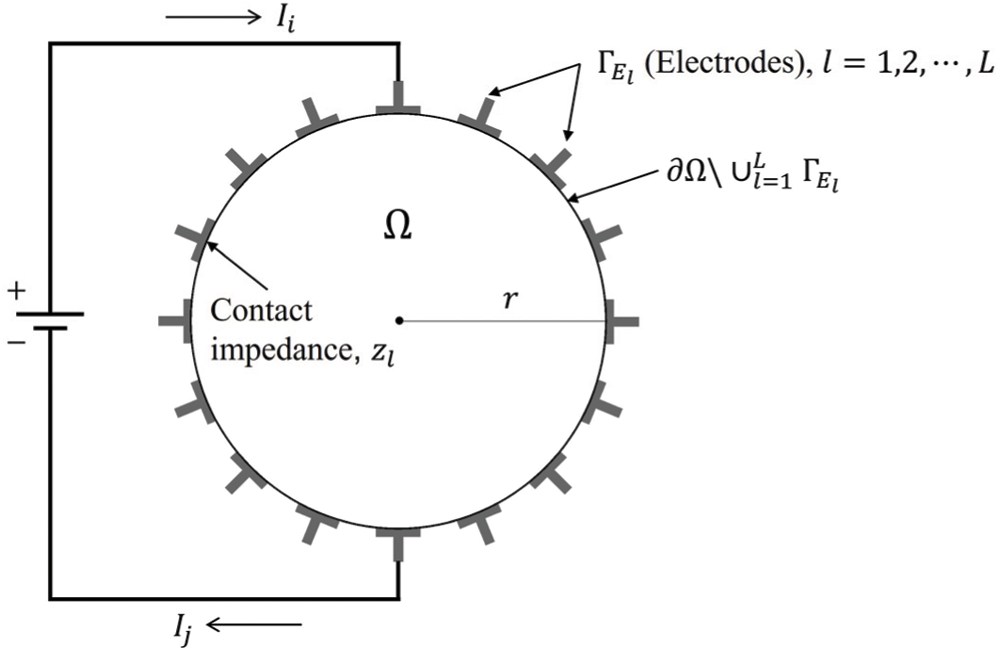
Figure 1: Schematic of a circular structure and surface electrodes
The forward problem described by the CEM can be formulated as the following boundary value problem:
where
to the model. To determine the reference point for the electric potential,
must be satisfied. We multiply Eq. (1) by a test function
Using the boundary conditions (2a) and (2c), Eq. (5) can be rewritten as
Next, we integrate Eq. (2a) over
Eq. (7) is multiplied by a test value
Adding Eqs. (6) and (8) results in
Eq. (9) is the weak form of the forward problem. The electric potential
where
The choice of
where
where the matrices and vectors are written as
In Eq. (16d),
2.2 Validation of Forward Solutions
For validation, the forward solutions are compared to the solutions obtained using Technology Computer-Aided Design (TCAD) software. TCAD is used for modeling electronic design processes and the behavior of electrical devices based on fundamental physics [23]. Fig. 2 shows the configuration of a circular domain with a radius of 10 cm. The electrical conductivity of the domain is
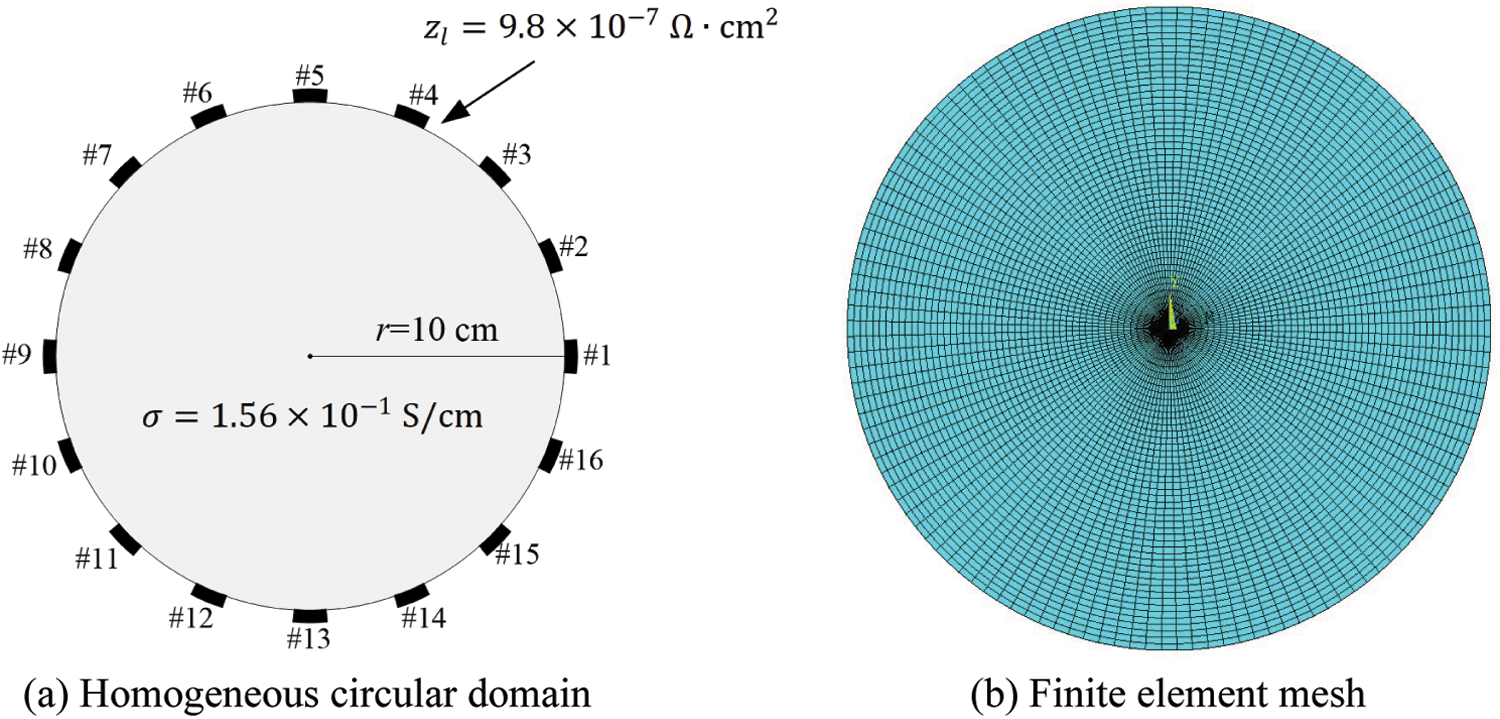
Figure 2: Homogeneous circular domain and finite element mesh for validating the forward solution
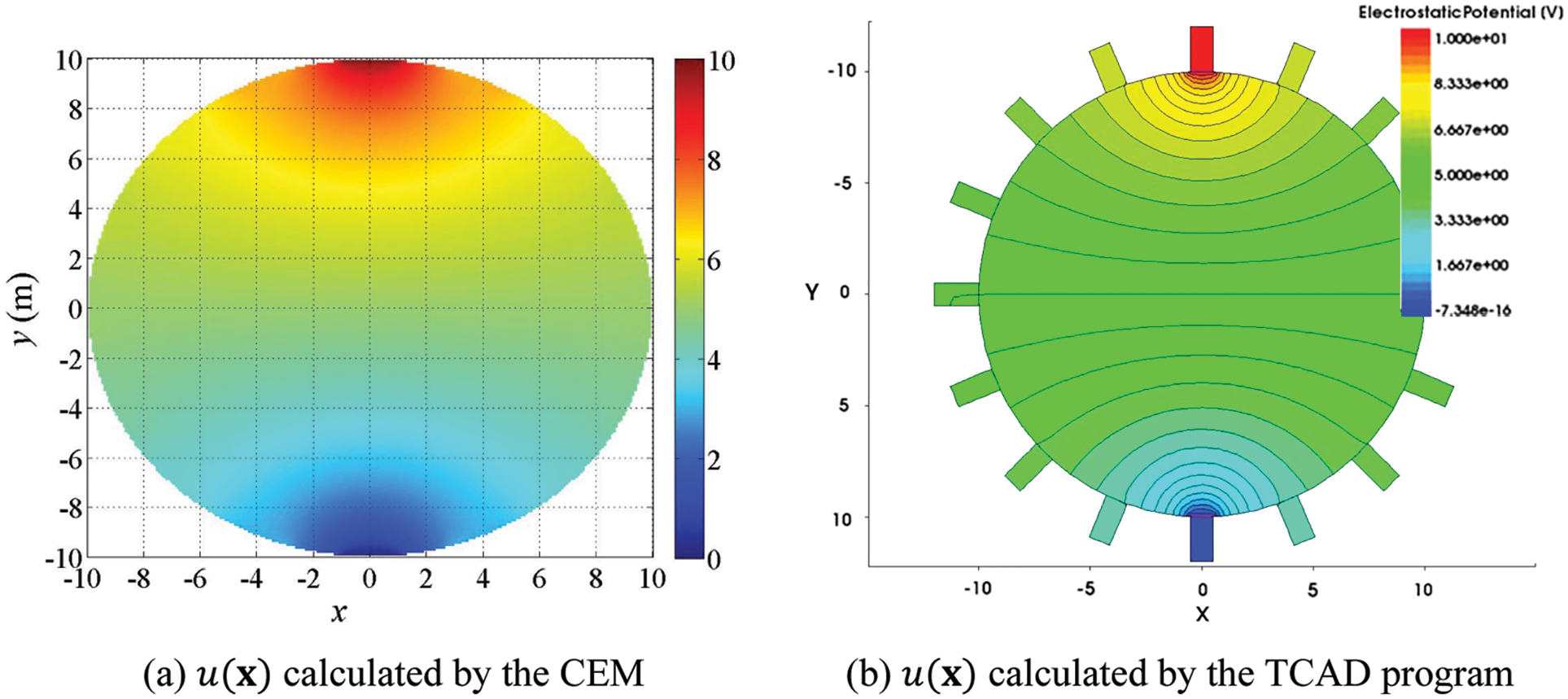
Figure 3: Calculated electric potential, u(x), in the homogeneous circular domain
The error of the forward solution relative to the TCAD result can be calculated using the following equation:
Table 1 shows the electric potential values at each electrode and the corresponding relative errors. The maximum error is 3.37%, which demonstrates the accuracy of the forward solution. Fig. 4 depicts the electric potential,
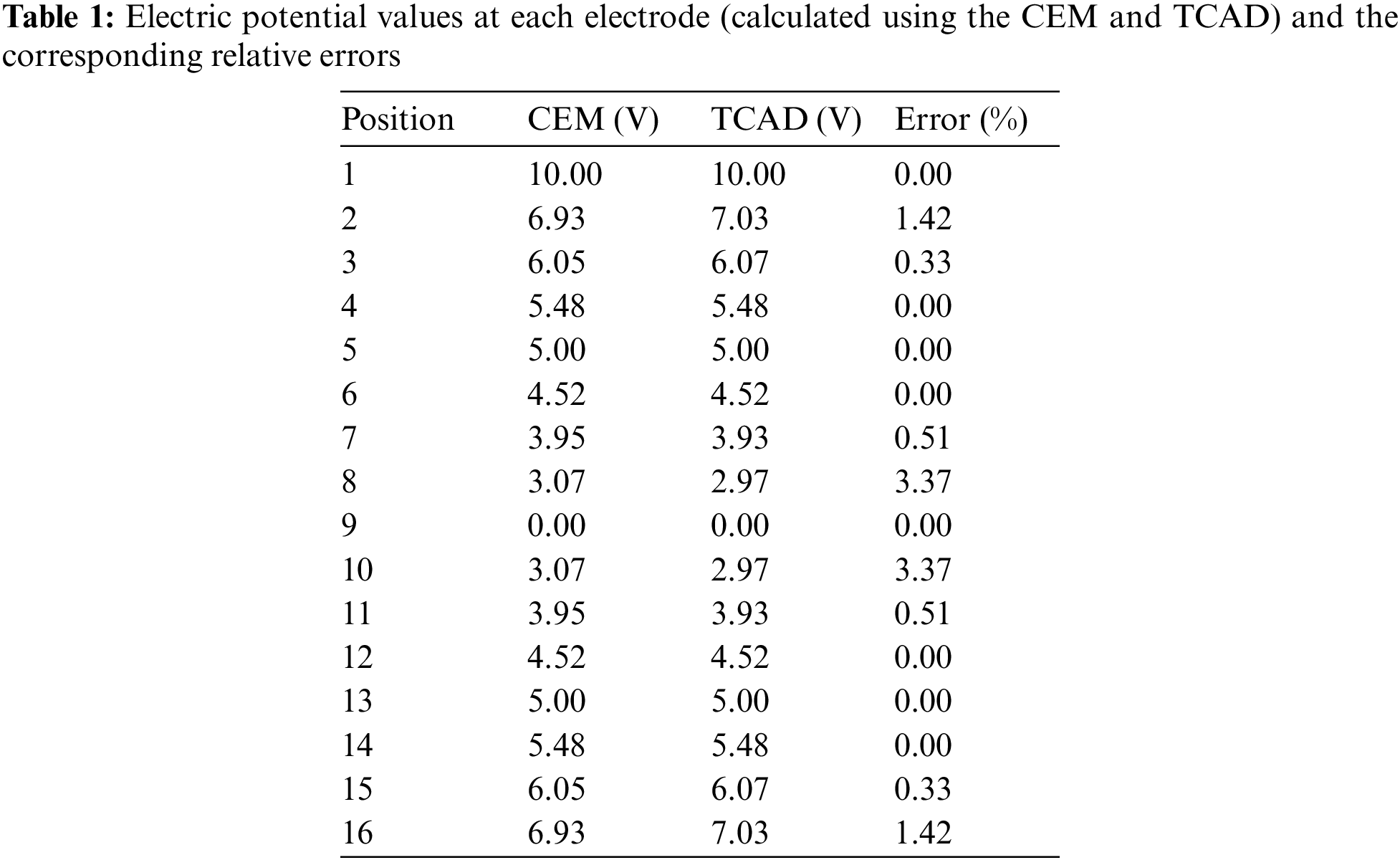

Figure 4: Graphical representation of the electrical potential at each electrode
2.3 Mesh-Type Dependency of the Forward Solution
For investigating the dependency of the forward solutions on the finite element mesh, two mesh types are explored: a radial mesh composed of eight-node quadrilateral elements and a mixed mesh with a square section inside. Fig. 5 illustrates these two types of meshes.

Figure 5: Two finite element mesh types for forward and inverse analyses
Fig. 6 shows a circular domain with a radius of 15 cm and electrodes attached to its boundary. The domain is assumed to be homogeneous, with an electrical conductivity of

Figure 6: Homogeneous circular domain with 32 electrodes on the boundary

Figure 7: Forward solutions calculated using the two meshes
3.1 PDE-Constrained Optimization
The problem of reconstructing the electrical conductivity profile of a structure using the electric potential measured at surface electrodes can be formulated as the following PDE-constrained optimization problem:
The objective functional
where
3.2 First-Order Optimality Conditions
The PDE-constrained optimization problem can be converted to an unconstrained optimization problem using a Lagrange multiplier method. Specifically, the objective functional
where
3.2.1 First Optimality Condition: State Problem
At the optimum of the Lagrangian, its first variation with respect to the adjoint variables
3.2.2 Second Optimality Condition: Adjoint Problem
At the optimum of the Lagrangian, its first variation with respect to the state variables
Because
Eq. (25) is the governing equation for adjoint variable
3.2.3 Third Optimality Condition: Control Problem
Finally, the first variation of the Lagrangian with respect to the control variable
Because
The control problem is a boundary value problem for the electrical conductivity
4 Inversion Setup and the Simulation Process
4.1 Finite Element Formulation of the Adjoint Problem
The adjoint problem described in Section 3.2.2 can be solved using the Galerkin finite element method. Specifically, Eq. (25) is multiplied by a test function
where
where
Substituting Eqs. (13), (14), (31) and (32) into (30) results in the following linear system of equations:
where
Solving Eq. (33) yields nodal values of adjoint variable
The submatrices in Eq. (33) are related to those of the state problem through
Eq. (38) contributes to reducing the computational cost of constructing the system matrices of the adjoint problem in the inversion process.
By solving the state and adjoint problems, the first and second optimality conditions are satisfied. Only the true profile of
1) Assuming the initial profile of
2) Using the state solution
3) Using the state and adjoint solutions, calculate the reduced gradient for
where the derivatives are calculated using second-order accurate finite difference methods. When using a radial mesh, such as that shown in Fig. 5a, the reduced gradient (40) expressed in a cylindrical coordinate system can be used
4) Determine the search direction using a line search method and update the electrical conductivity profile
4.2.1 Conjugate Gradient Method with Inexact Line Search
In this study, the search direction for the optimal solution of the control variable
Then, the electrical conductivity vector
where
The misfit functional is evaluated using the updated electrical conductivity
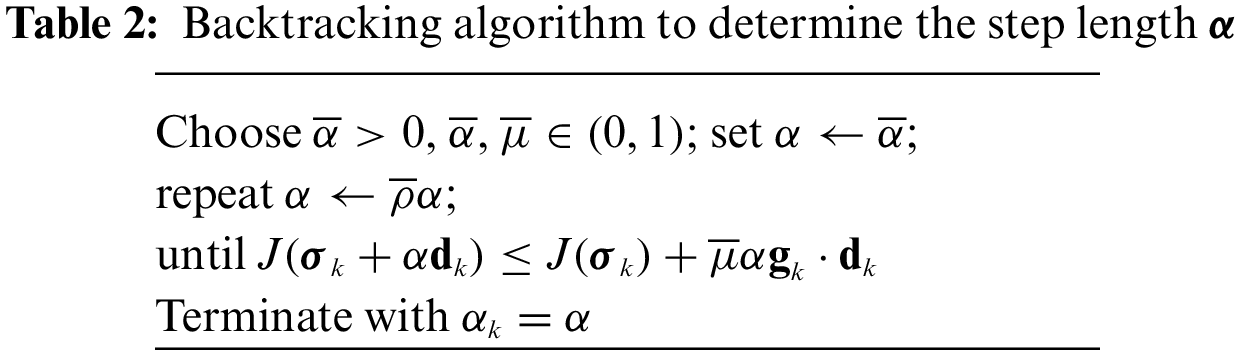
In this study, an inexact line search method is used to determine a step length
where
4.2.2 Regularization Factor Continuation Scheme
The choice of the regularization factor
in which
In Eq. (45),
Therefore,
where the value of the weight factor
Consider a circular domain with a radius of 15 cm, as shown in Fig. 8. A total of 32 electrodes is placed on the boundary and spaced evenly to cover 50% of the boundary. For finite element implementation, the mixed mesh illustrated in Fig. 5b is used. The contact impedance of the electrodes is

Figure 8: Schematic of a circular domain and 32 surface electrodes used for inversion
Fig. 9 shows the target, initial guess, and reconstructed electrical conductivity profiles. The target profile is homogeneous with

Figure 9: Numerical inversion for homogeneous target profile
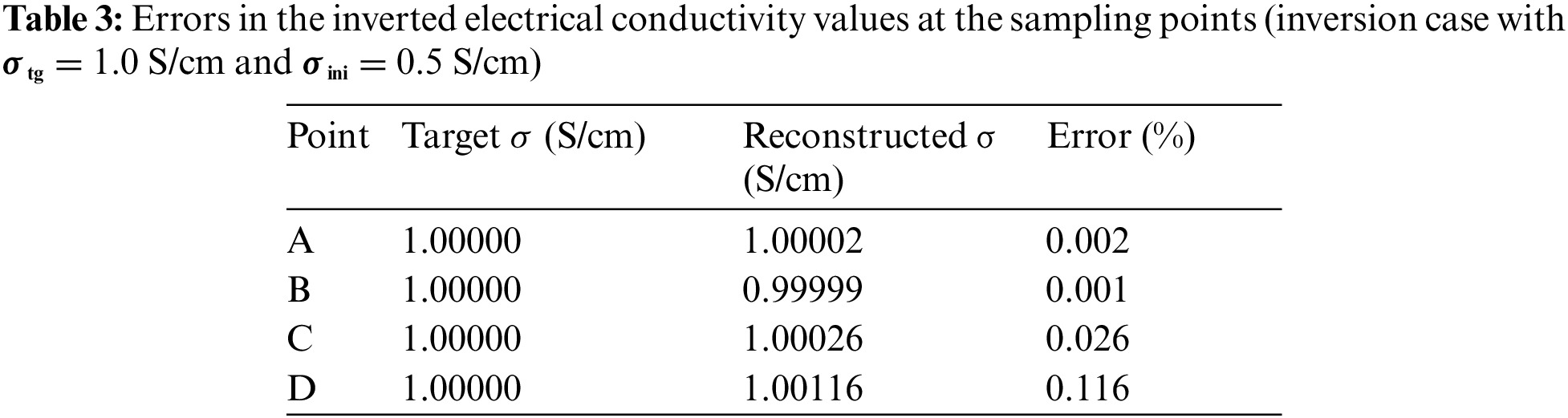
To investigate the accuracy of the inversion result, the errors in the inverted electrical conductivity values are calculated at four sampling points, as shown in Fig. 10: A(0,0), B(4,0), C(8,0), and D(12,0). Table 3 lists the errors at each sampling point. The maximum error is 0.116%, which demonstrates that the inversion for the homogeneous electrical conductivity profile is highly accurate.

Figure 10: Sampling points for error calculation
To investigate the effect of the initial guess on the reconstructed profile, four cases of the inversion with different initial-to-target ratios are considered. Table 4 shows the four cases for the initial guess

Figs. 11–14 display the inversion results for the four electrical conductivity profiles presented in Table 4. In all four cases, the homogeneous target values are accurately reconstructed. In particular, as shown in Figs. 12b and 14b, the target values are recovered well even when the target is 10 times smaller or larger than the initial guess. Figs. 11c, 12c, 13c and 14c show the misfit

Figure 11: Inversion results for Case 1; σtg = 1.5 S/cm, σini = 0.7 S/cm

Figure 12: Inversion results for Case 2; σtg = 15.0 S/cm, σini = 1.5 S/cm


Figure 13: Inversion results for Case 3; σtg = 1.5 S/cm, σini = 2.3 S/cm

Figure 14: Inversion results for Case 4; σtg = 1.0 S/cm, σini = 10.0 S/cm

Next, the inversion is performed to reconstruct heterogeneous electrical conductivity profiles. Fig. 15 shows three cases of the target profile. In Case 5, the target values of the electrical conductivity are

Figure 15: Heterogeneous target electrical conductivity profiles
Figs. 16–18 show the inversion results for the heterogeneous electrical conductivity profiles. The target conductivity values are reconstructed reasonably well in the three heterogeneous cases. Figs. 16c, 17c, and 18c show the response misfit

Figure 16: Inversion results for Case 5
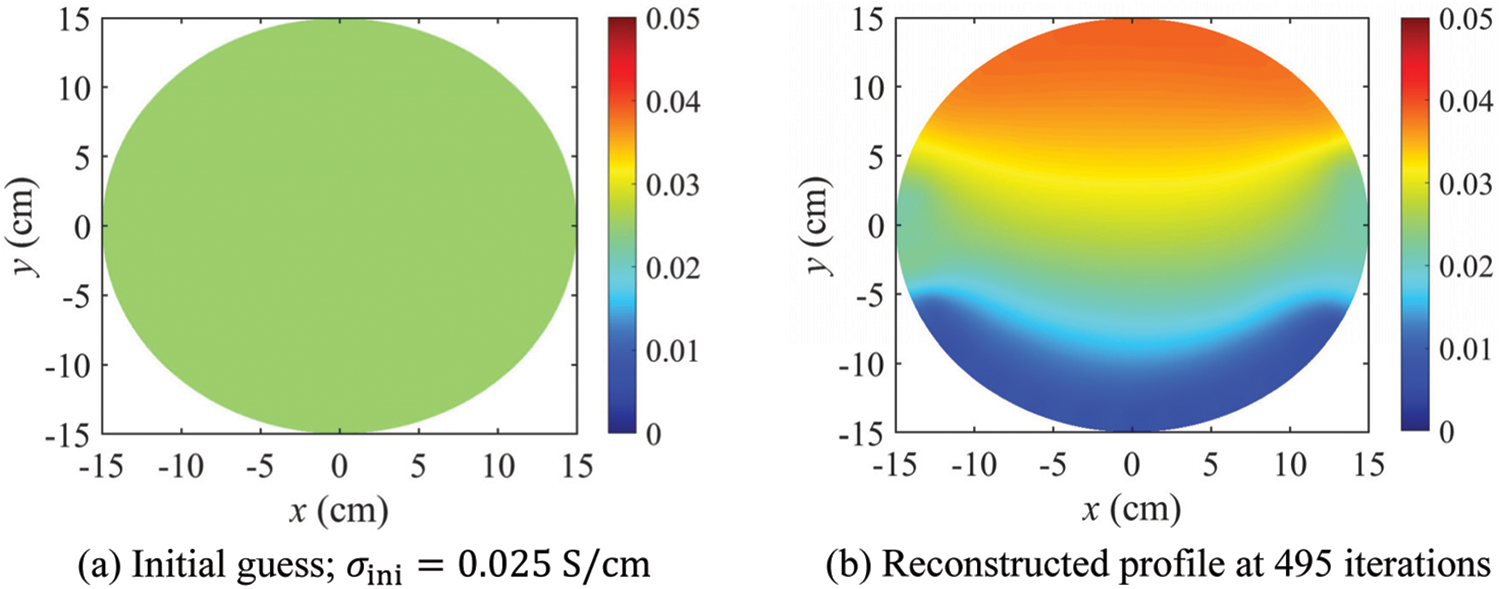

Figure 17: Inversion results for Case 6

Figure 18: Inversion results for Case 7

This study was conducted to develop a nonlinear inversion method for electrical impedance tomography of structures using measured electric potentials at the surface. The proposed method minimizes the misfit between calculated and measured electric potential values at surface electrodes within a PDE-constrained optimization framework. The CEM was used as a forward model to calculate the electric potential due to current input. By solving the KKT conditions of the Lagrangian iteratively, the inversion procedure could successfully recover heterogeneous electrical conductivity profiles. The TN regularization scheme was used to mitigate the ill-posedness of the inverse problem and improve the convergence of the solution. A series of numerical results showed that the homogeneous and heterogeneous electrical conductivity profiles were successfully reconstructed using the inversion method developed in this study.
For all numerical example cases, the misfit was decreased from its original value by a factor on the order of
Funding Statement: This research was funded by the National Research Foundation of Korea, the Grant from a Basic Science and Engineering Research Project (NRF-2017R1C1B200497515), and the Grant from Basic Laboratory Support Project (NRF-2020R1A4A101882611). The supports are greatly appreciated.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. Paipetis, A. S., Matikas, T. E., Aggelis, D. G., van Hemelrijck, D. (2012). Emerging technologies in non-destructive testing. London: CRC Press. [Google Scholar]
2. Kralovec, C., Schagerl, M. (2020). Review of structural health monitoring methods regarding a multi-sensor approach for damage assessment of metal and composite structures. Sensors, 20(3), 826. DOI 10.3390/s20030826. [Google Scholar] [CrossRef]
3. Nachman, A. I. (1988). Reconstruction from boundary measurements. Annals of Mathematics, 128(3), 531–576. DOI 10.2307/1971435. [Google Scholar] [CrossRef]
4. Vauhkonen, M. (1997). Electrical impedance tomography and prior information. Finland: Kuopio University. [Google Scholar]
5. Borsic, A., Lionheart, W. R. B., McLeod, C. N. (2002). Generation of anisotropic-smoothness regularization Filters for EIT. IEEE Transactions on Medical Imaging, 21(6), 579–587. DOI 10.1109/TMI.2002.800611. [Google Scholar] [CrossRef]
6. Kaipio, J. P., Kolehmainen, V., Somersalo, E., Vauhkonen, M. (2000). Statistical inversion and Monte Carlo sampling methods in electrical impedance tomography. Inverse Problems, 16(5), 1487–1522. DOI 10.1088/0266-5611/16/5/321. [Google Scholar] [CrossRef]
7. Santosa, M., Vogelius, M. (1990). A back projection algorithm for electrical impedance imaging. SIAM Journal on Applied Mathematics, 50(1), 216–243. DOI 10.1137/0150014. [Google Scholar] [CrossRef]
8. Cheney, M., Isaacson, D., Newell, J. C., Simske, S., Goble, J. (1990). Noser: An algorithm for solving the inverse conductivity problem. International Journal of Imaging Systems and Technology, 2(2), 66–75. DOI 10.1002/(ISSN)1098-1098. [Google Scholar] [CrossRef]
9. Knudsen, K., Lassas, M., Mueller, J. L., Siltanen, S. (2009). Regularized D-bar method for the inverse conductivity problem. Inverse Problems and Imaging, 3(4), 599–624. DOI 10.3934/ipi.2009.3.599. [Google Scholar] [CrossRef]
10. Abbasi, A., Vahdat, B. V. (2010). A non-iterative linear inverse solution for the block approach in EIT. Journal of Computational Science, 1(4), 190–196. DOI 10.1016/j.jocs.2010.09.001. [Google Scholar] [CrossRef]
11. Hamilton, S. J., Hauptmann, A. (2018). Deep D-bar: Real-time electrical impedance tomography imaging with deep neural networks. IEEE Transactions on Medical Imaging, 37(10), 2367–2377. DOI 10.1109/TMI.2018.2828303. [Google Scholar] [CrossRef]
12. Jordana, J., Gasulla, M., Pallas-Areny, R. (2001). Electrical resistance tomography to detect leaks from buried pipes. Measurement Science and Technology, 12(8), 1061–1068. DOI 10.1088/0957-0233/12/8/311. [Google Scholar] [CrossRef]
13. Baltopoulos, A., Polydorides, N., Pambaguian, L., Vavouliotis, A., Kostopoulos, V. (2012). Damage identification in carbon fiber reinforced polymer plates using electrical resistance tomography mapping. Journal of Composite Materials, 47(26), 3285–3301. DOI 10.1177/0021998312464079. [Google Scholar] [CrossRef]
14. Vauhkonen, P. J., Vauhkonen, M., Savolainen, T., Kaipio, J. P. (1999). Three-dimensional electrical impedance tomography based on the complete electrode model. IEEE Transactions on Biomedical Engineering, 46(9), 1150–1160. DOI 10.1109/10.784147. [Google Scholar] [CrossRef]
15. Agsten, B. (2015). Comparing the complete and the point electrode model for combining TCS and EEG (Master Thesis). Westfälische Wilhelms-Universität Münster, Germany. [Google Scholar]
16. Hadinia, M., Jafari, R., Soleimani, M. (2016). EIT image reconstruction based on a hybrid FE-EFG forward method and the complete-electrode model. Physiological Measurement, 37(6), 863–878. DOI 10.1088/0967-3334/37/6/863. [Google Scholar] [CrossRef]
17. Garrillo, M., Gómez, J. A. (2015). A globally convergent algorithm for a PDE-constrained optimization problem arising in electrical impedance tomography. Numerical Functional Analysis and Optimization, 36(6), 748–776. DOI 10.1080/01630563.2015.1031379. [Google Scholar] [CrossRef]
18. Albuquerque, Y. F., Laurain, A., Sturm, K. (2020). A shape optimization approach for electrical impedance tomography with point measurements. Inverse Problems, 36(9), 095006. DOI 10.1088/1361-6420/ab9f87. [Google Scholar] [CrossRef]
19. Gupta, M., Mishra, R. K., Roy, S. (2020). Sparse reconstruction of log-conductivity in current density impedance tomography. Journal of Mathematical Imaging and Vision, 62(2), 189–205. DOI 10.1007/s10851-019-00929-5. [Google Scholar] [CrossRef]
20. Abdulla, U. G., Bukshtynov, V., Seif, S. (2021). Cancer detection through electrical impedance tomography and optimal control theory: Theoretical and computational analysis. Mathematical Biosciences and Engineering, 18(4), 4834–4859. DOI 10.3934/mbe.2021246. [Google Scholar] [CrossRef]
21. Pasha, M., Kupis, S., Ahmad, S., Khan, T. (2021). A Krylov subspace type method for electrical impedance tomography. ESIAM: Mathemetical Modelling and Numerical Analysis, 55(6), 2827–2847. DOI 10.1051/m2an/2021057. [Google Scholar] [CrossRef]
22. Cheng, K., Isaacson, D., Newell, J. C., Gisser, D. G. (1989). Electrode models for electric current computed tomography. IEEE Transactions on Biomedical Engineering, 36(9), 918–924. DOI 10.1109/10.35300. [Google Scholar] [CrossRef]
23. Saha, S. K. (2013). Technology computer aided design: Simulation for VLSI MOSFET. London: CRC Press. [Google Scholar]
24. Kang, J. W., Kallivokas, L. F. (2010). The inverse medium problem in 1D PML-truncated heterogeneous semi-infinite domains. Inverse Problems in Science and Engineering, 18(6), 759–786. DOI 10.1080/17415977.2010.492510. [Google Scholar] [CrossRef]
25. Kang, J. W., Kallivokas, L. F. (2011). The inverse medium problem in heterogeneous PML-truncated domains using scalar probing waves. Computer Methods in Applied Mechanics and Engineering, 200(1–4), 265–283. DOI 10.1016/j.cma.2010.08.010. [Google Scholar] [CrossRef]
26. Joh, N., Kang, J. W. (2021). Material profile reconstruction using plane electromagnetic waves in PML-truncated heterogeneous domains. Applied Mathematical Modeling, 96(6), 813–833. DOI 10.1016/j.apm.2021.03.026. [Google Scholar] [CrossRef]
27. Neville, A. M. (1995). Properties of concrete. London: Longman. [Google Scholar]
Appendix A. Finite Differences for a Non-Unifrom Grid
In a uniform finite-element mesh, as shown in Fig. A1, the first-order and second-order derivatives at node
where

Figure A1: Uniform finite element mesh
This study used the backward difference method shown in Eqs. (A5)–(A8) to calculate the derivative at nodes located at the boundary:
For a radial finite-element mesh such as that shown in Fig. A2, the polar coordinate system can be used to calculate the derivative.

Figure A2: Polar coordinate system finite element mesh
The central difference method for the polar coordinate system is shown in
where
In a non-uniform finite-element mesh, as shown in Fig. A3, the spacing of the adjacent nodes on the left and right or above and below may differ. For such a finite element mesh, the finite difference method was used to calculate the derivatives, as shown in
where

Figure A3: Non-uniform finite element mesh
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools