
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
A Study of Traveling Wave Structures and Numerical Investigation of Two-Dimensional Riemann Problems with Their Stability and Accuracy
Department of Mathematics, College of Science, Taibah University, Al-Madinah Al-Munawarah, 42353, Saudi Arabia
* Corresponding Authors: Abdulghani Ragaa Alharbi. Email: ;
(This article belongs to the Special Issue: Advanced Computational Methods in Fluid Mechanics and Heat Transfer)
Computer Modeling in Engineering & Sciences 2023, 134(3), 2193-2209. https://doi.org/10.32604/cmes.2022.018445
Received 25 November 2021; Accepted 11 May 2022; Issue published 20 September 2022
 View Full Text
View Full Text Download PDF
Download PDFAbstract
The Riemann wave system has a fundamental role in describing waves in various nonlinear natural phenomena, for instance, tsunamis in the oceans. This paper focuses on executing the generalized exponential rational function approach and some numerical methods to obtain a distinct range of traveling wave structures and numerical results of the two-dimensional Riemann problems. The stability of obtained traveling wave solutions is analyzed by satisfying the constraint conditions of the Hamiltonian system. Numerical simulations are investigated via the finite difference method to verify the accuracy of the obtained results. To extract the approximation solutions to the underlying problem, some ODE solvers in FORTRAN software are applied, and outcomes are shown graphically. The stability and accuracy of the numerical schemes using Fourier’s stability method and error analysis, respectively, to increase the reassurance are investigated. A comparison between the analytical and numerical results is obtained and graphically provided. The proposed methods are effective and practical to be applied for solving more partial differential equations (PDEs).Keywords
Diverse phenomena in nature and technology are described using nonlinear evolution equations (NLEEs). In physics, for instance, the heat transfer and the traveling wave phenomena are successfully modeled by PDEs. In chemistry, the dispersion of a chemically reactive substance is controlled by PDEs. Also, PDEs are invoked to characterize population growth problems. Moreover, most physical incidents of shallow-water waves, quantum mechanics, plasma physics, electricity, fluid dynamics, and more others are investigated using PDEs. In order to better comprehend the qualitative characteristics of such equations, one can study their analytical solutions. A distinct range of traveling wave structures allows us to explain the mechanisms of immense complicated phenomena. As a result, some researchers have revealed numerous effective methods. Some of the powerful approaches are the Sine-Gordon expansion approach [1], the modified simple equation technique [2], the tanh-sech process [3,4], the trial equation method [5], the
The Riemann wave system [16,17] is given by
where
Since our knowledge of constructing exact solutions for the Riemann wave equations is basically based on few techniques, we utilize the generalized exponential rational function approach [8] to construct the exact solutions of the considered equations. This technique depends on Jacobi elliptic functions. As a result, various solitary traveling wave solutions can be simply generated in terms of trigonometric and hyperbolic functions. Regarding the numerical solution, some numerical simulations are presented using the finite difference method to emphasize that the obtained results are accurate. The numerical solutions of the considered system are obtained by approaching the equations on a mesh using the finite-difference notations. The domain is divided into a limited set of grids to achieve meshes for both independent variables x and y. It is well known that the wave of the solutions has areas with rapid spatial changes, for instance, steep fronts structures. In order to resolve these types of areas, fine numbers of grids, for x and y, are required. The step size,
The generalized exponential rational function approach is comprehensively summarized in this section, as presented in [8]. Assume that
is a given nonlinear PDE in the unknown functions
Then, Eq. (2) is converted into
where
where
The balance principle is used to determine the value of N appearing in Eq. (6). Moreover, the coefficients
In this section, we study the exact solutions of system (1) using the generalized exponential rational function approach. Substitute Eq. (3) into system (1) to have
We now integrate each equation in system (7) with respect to
where
where
Family 1: For
Substituting Eq. (10) into the first equation of system (9) and then we insert the result into the first equation of system (8) give an algebraic system whose solutions are given as follows:
Case 1:
Substituting Eq. (11) into system (9) and Eq. (10) gives the exact solutions of system (1) which are illustrated as follows:
Case 2:
Inserting Eq. (13) into system (9) and Eq. (10) yields the exact solutions of system (1) which are expressed as
Case 3:
Plugging Eq. (15) into system (9) and Eq. (10) gives the traveling wave solutions of system (1) which are given by
Case 4:
Putting Eq. (11) into system (9) and Eq. (10) leads to the exact solutions of system (1) which are shown as
Family 2: For
Case 1:
Substituting Eq. (20) into system (9) and Eq. (19) gives the exact solutions of system (1) which are shows as follows:
Case 2:
Inserting Eq. (22) into system (9) and Eq. (19) yields the traveling wave solutions of system (1) which are
Case 3:
Putting Eq. (24) into system (9) and Eq. (19) gives the exact solutions of system (1) which are
Case 4:
Substituting Eq. (26) into system (9) and Eq. (19) leads to the exact solutions of system (1) which are expressed as
4 Stability of the Analytical Solution
We introduce the Hamiltonian system in this section. Hamiltonian system is applied on analytical solutions to test their stability on a specific interval. The Hamiltonian system [24,25] is expressed by
where
When we apply Eqs. (28) and (29) on Eq. (18) over the rectangular domain
where the parameters
5 Finite Difference Semi-Discretization Scheme on a Fixed Mesh
This section is devoted to study the numerical solutions of system (1) over the physical domain
Here,
where
We compute the boundary conditions as follows:
These boundary conditions allow us to employ the fictitious points in computing the spatial derivatives at the boundaries of the domain. It is worth noting that the initial conditions are established by evaluating the exact solution at
where
In order to extract the numerical solutions of the considered equation, we implement the finite difference approach which depends on a standard ODE solver in FORTRAN software, DASPK solver [25]. The standard backward differentiation operators are invoked to approximate the time derivatives in this solver. In addition, the Jacobian matrix of the linearised system is approximated by applying LU factorization. To have less bandwidth for this matrix, we use a unique system numbering for the unknowns
6 Stability of the Numerical Solution
This section investigates the stability of the numerical solution using a Fourier’s stability technique. From the second and third equations of system (8), we have
Substituting these equations into the first equation of system (1) yields
where
where
The boundary conditions are ignored. Consider the point
plugging Eq. (36) into scheme (35) yields
Dividing both sides of the result by
Assume that
Then, Eq. (38) becomes
Hence,
According to the Fourier stability, the stability of the considered scheme occurs if the absolute value of
Taylor series is used in this section to examine the order of the accuracy of scheme (31). We evaluate the truncation error to obtain the order. Suppose that
where
where
Hence,
The leading terms mentioned above are known as the fundamental part of the local truncation error, and we have accepted the truth that
The truncation error, which is generated in every step, is given by
8 Convergence of the Numerical Schemes
Now consider that a sequence of computations is carried out using given initial data, with the refinement of three meshes, so that
We have established above that the implicit schema is unconditional stability. So, we will show that the implicit schemes are unconditional convergence. Suppose that the error e is given by
Now,
Hence by using the fact that
where
Substituting Eq. (46) into Eq. (45) yields
Since the above inequality holds for each
Since the given initial data is used we can identify
But
Hence, the scheme (Eq. (31)) is convergent as
In this section, we discuss the results shown in this work. We extract a distinct range of traveling wave structures of the two-dimensional Riemann problems via the generalized exponential rational function method. The obtained solutions are presented in terms of trigonometric and hyperbolic functions. We examine the stability of Eq. (18) over the rectangular domain
The numerical solutions are discussed by employing the finite difference method to convert the underlying problems into the system of ODEs with keeping time derivatives continuous. Then, I solve the resulted ODEs system using the DASPK solver. This method gives reliable and powerful results. This can be clearly seen in the graphical comparisons presented in the above-mentioned figures. For instance, Figs. 1 and 2 illustrate the behavior of the analytical and numerical solutions for
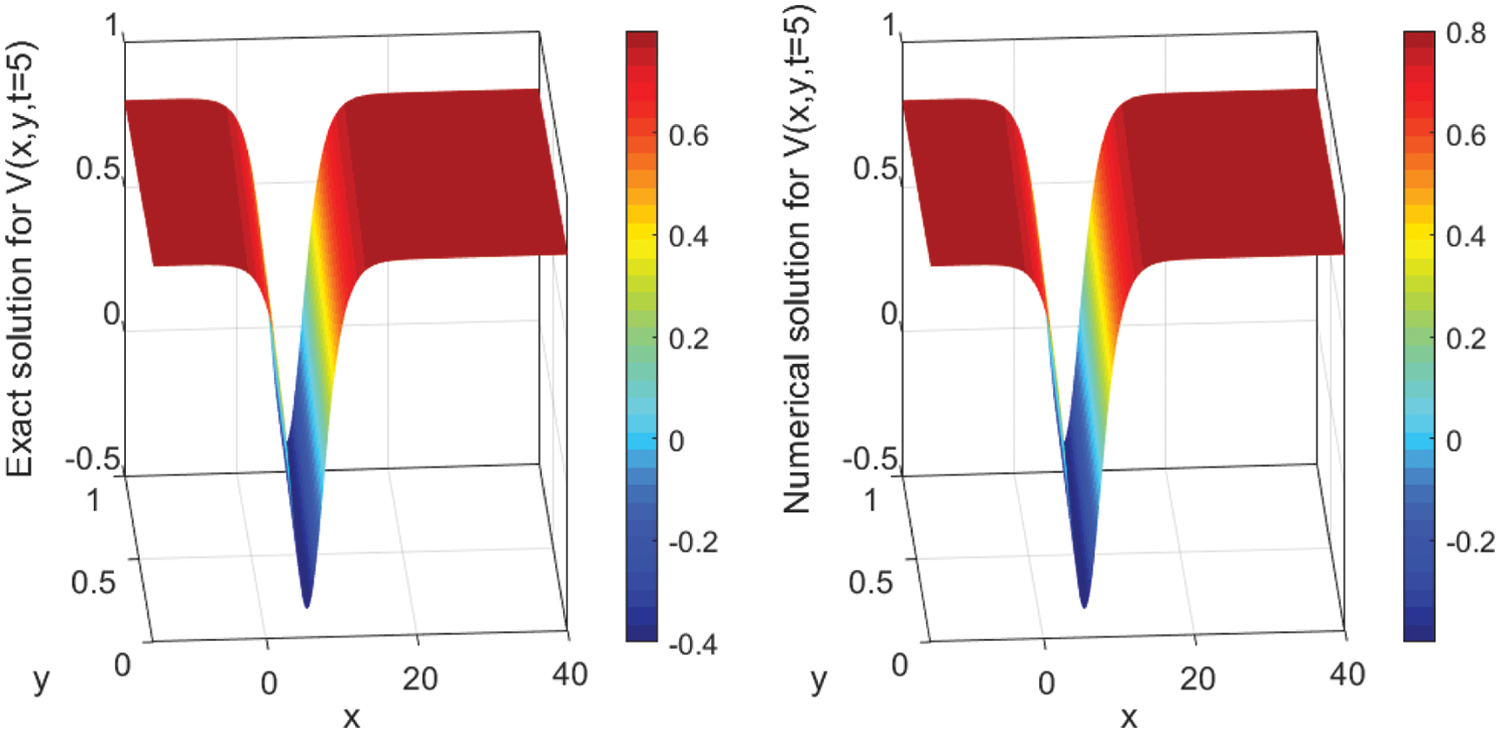
Figure 1: Surface plot of V (x, y, t) presenting the analytical (left) and the numerical (right) solutions’ evolution in time t = 5 using N = 3000 with Δx = 0.02 and M = 100 with Δy = 0.01. The parameter values are A2 = 1.2, β = −0.5, α = 2.70, and γ = −2.20
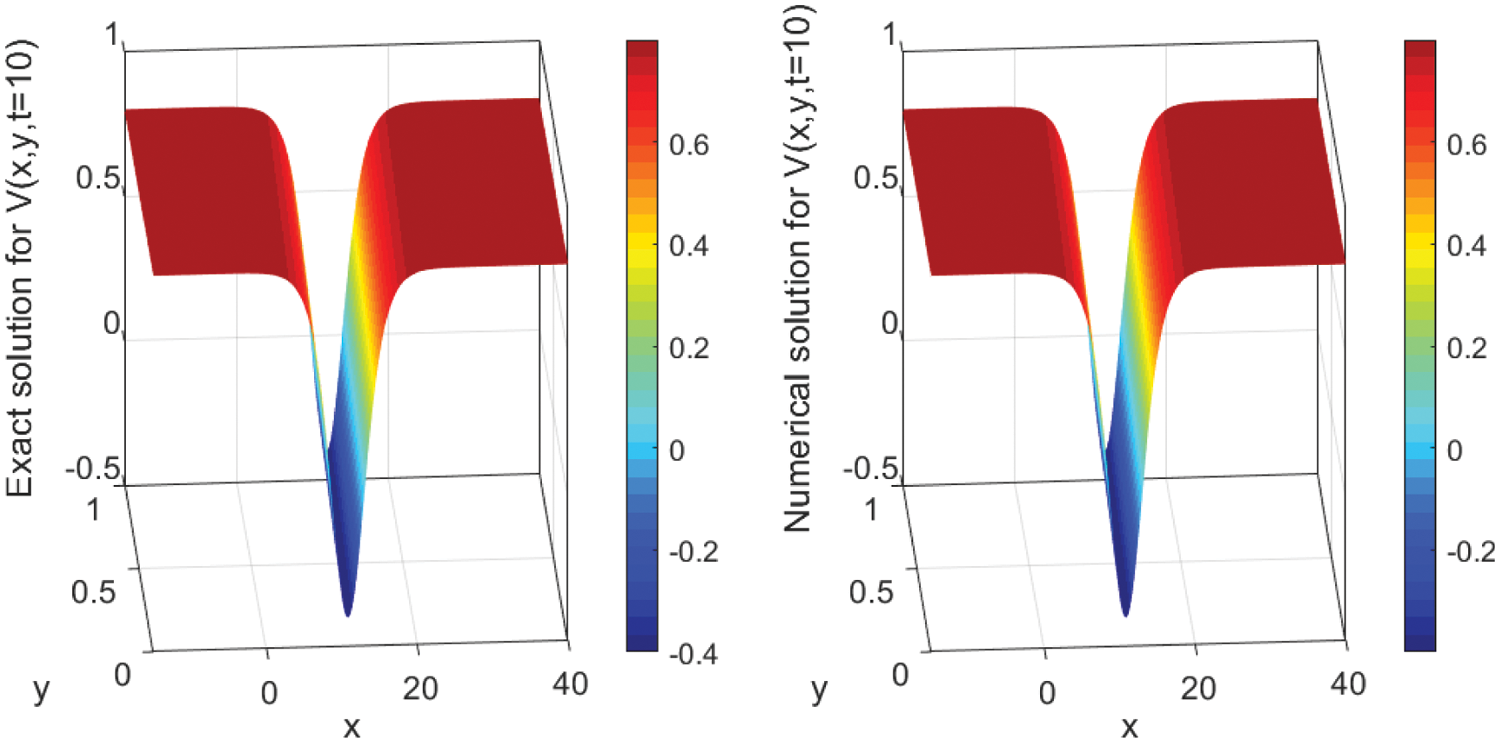
Figure 2: Surface plot of V (x, y, t) presenting the analytical (left) and the numerical (right) solutions’ evolution in time t = 10 using N = 3000 with Δx = 0.02 and M = 100 with Δy = 0.01. The parameter values are A2 = 1.2, β = −0.5, α = 2.70, and γ = −2.20
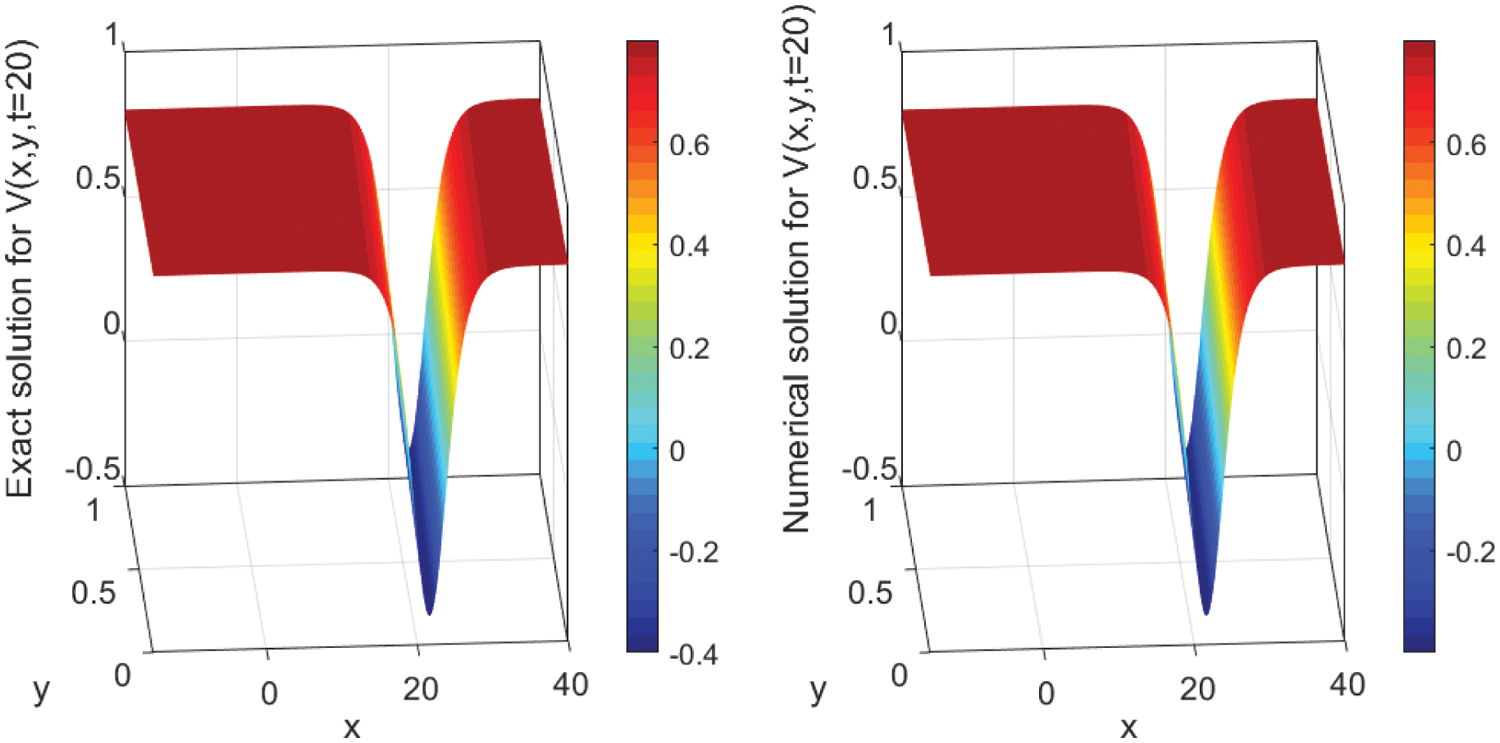
Figure 3: Surface plot of V (x, y, t) presenting the analytical (left) and the numerical (right) solutions’ evolution in time t = 20 using N = 3000 with Δx = 0.02 and M = 100 with Δy = 0.01. The parameter values are A2 = 1.2, β = −0.5, α = 2.70, and γ = −2.20
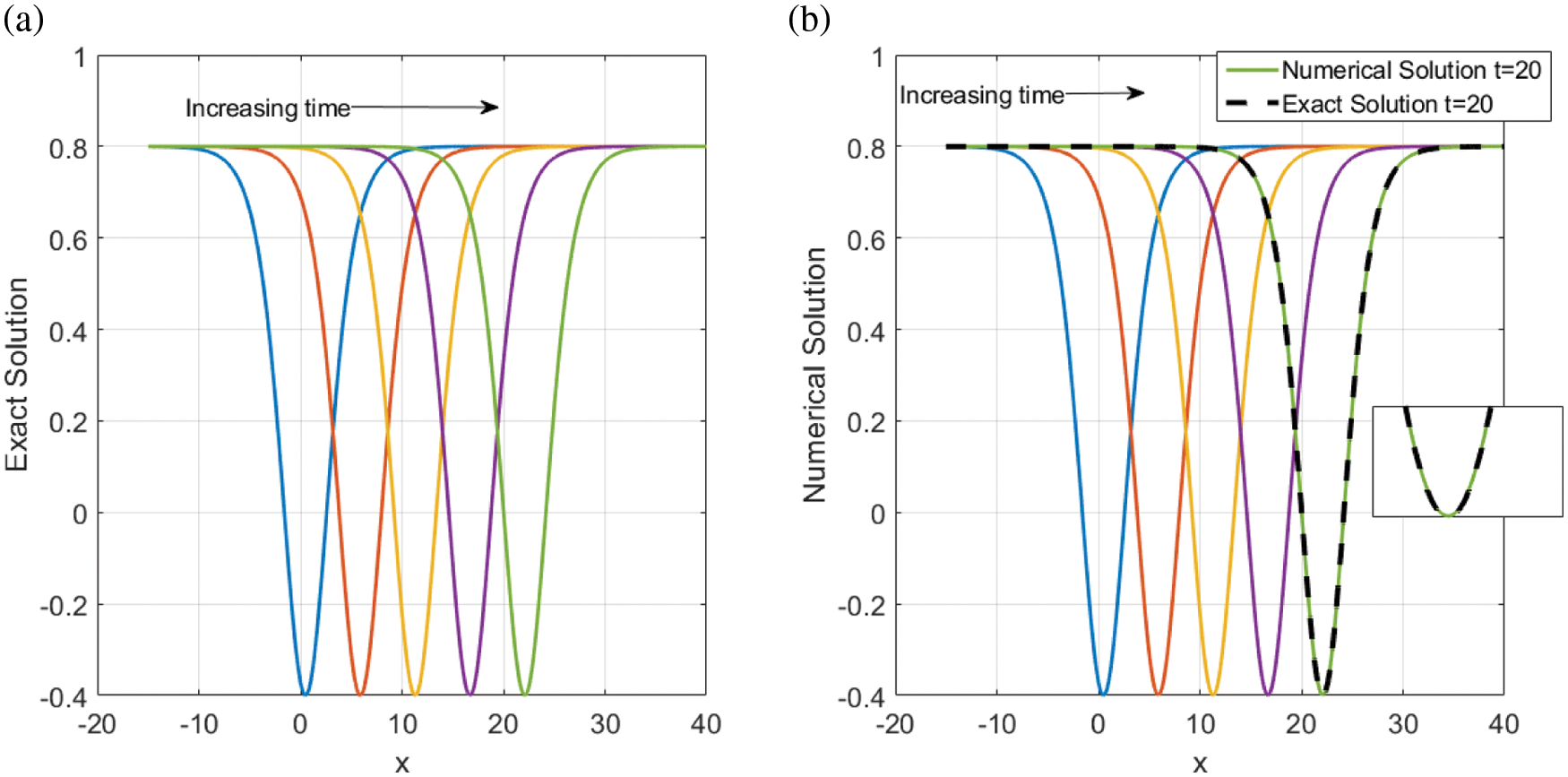
Figure 4: Time evolution of V (x, y, t) to the traveling wave structures (a) the analytical and (b) the numerical solutions with parameter values A2 = 1.2, β = −0.5, α = 2.70, and γ = −2.20. (b) also illustrates the performance of the used approaches
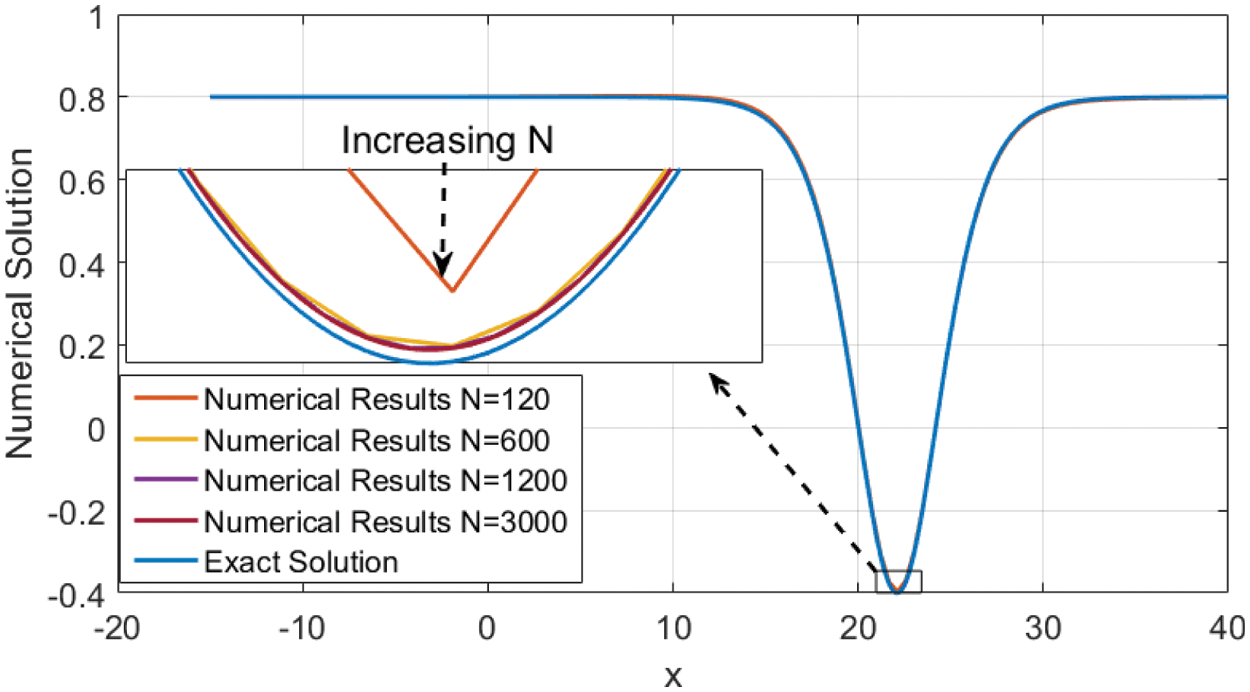
Figure 5: Presents a comparison of the numerical results of Eq. (31) at t = 20 for increasing N of the spatial variable x. The solid blue line shows the exact solution Eq. (12). The parameter values are A2 = 1.2, β = −0.5, α = 2.70, and γ = −2.20. The insets present zoomed-in wave characteristics
Table 1 illustrates
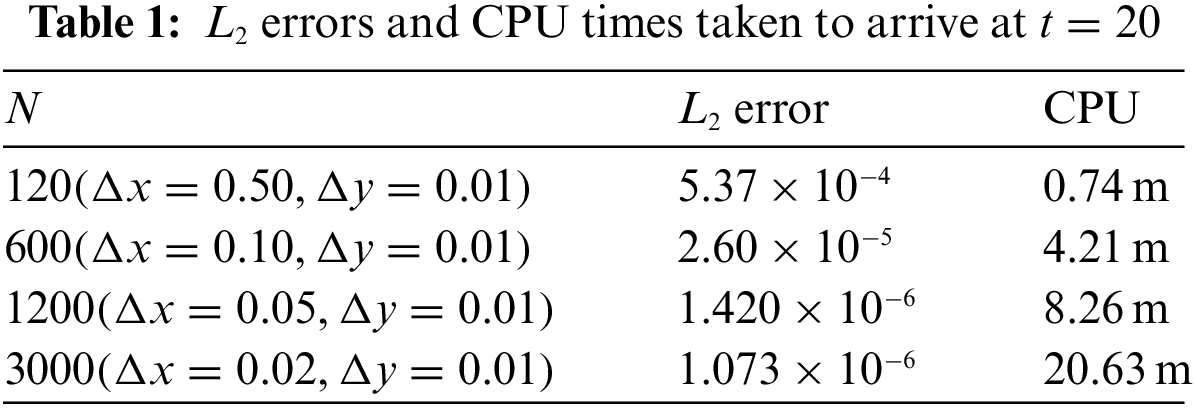
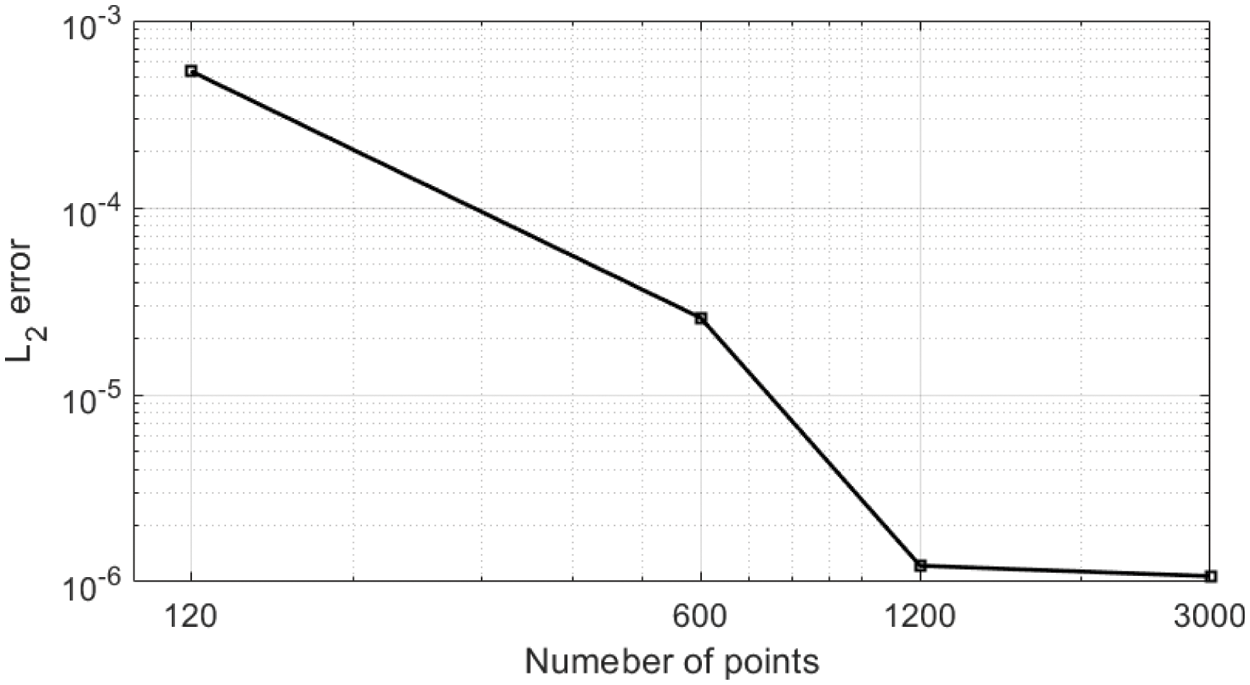
Figure 6: Illustrating L2 errors presenting in Table 1
We have favorably implemented an accurate finite difference method on a uniform mesh and the generalized exponential rational function method for the two-dimensional Riemann problems. The main advantage of the results is to show the traveling wave structures and prove their accuracy using numerical methods. By comparing the exact solutions using the generalized exponential rational function method with those from the numerical scheme, it was said that the numerical results are almost identical to the analytical results. It is well known that the numerical scheme is stable and allows a meaningful reduction in memory requirements. Using a fine mesh in both spatial variables x and y permits us to resolve the wave-like structures. We can conclude that the used methods can be efficiently applied to more nonlinear evolution models to construct their exact and numerical solutions.
Funding Statement: The author received no specific funding for this study.
Conflicts of Interest: The author declares that they have no conflicts of interest to report regarding the present study.
References
1. Cattani, C., Sulaiman, T. A., Baskonus, H. M., Bulut, H. (2018). Solitons in an in homogeneous Murnaghan’s rods. The European Physical Journal Plus, 133(6), 228. DOI 10.1140/epjp/i2018-12085-y. [Google Scholar] [CrossRef]
2. Jawad, A. J., Petkovic, M. D., Biswas, A. (2010). Modified simple equation method for nonlinear evolution equations. Applied Mathematics and Computation, 217(2), 869–877. DOI 10.1016/j.amc.2010.06.030. [Google Scholar] [CrossRef]
3. Malflieta, W., Hereman, W. (1996). The tanh method: Exact solutions of nonlinear evolution and wave equations. Physica Scripta, 54(6), 563–568. DOI 10.1088/0031-8949/54/6/003. [Google Scholar] [CrossRef]
4. Alharbi, A. R., Almatrafi, M. B., Lotfy, K. (2020). Constructions of solitary travelling wave solutions for Ito integro-differential equation arising in plasma physics. Results in Physics, 19, 103533. DOI 10.1016/j.rinp.2020.103533. [Google Scholar] [CrossRef]
5. Gurefe, Y., Misirli, E., Pandir, Y., Sonmezoglu, A., Ekici, M. (2015). New exact solutions of the davey-stewartson equation with power-law nonlinearity. Bulletin of the Malaysian Mathematical Sciences Society, 38(3), 1223–1234. DOI 10.1007/s40840-014-0075-z. [Google Scholar] [CrossRef]
6. Abdelrahman, M. A. E., Almatrafi, M. B., Alharbi, A. (2020). Fundamental solutions for the coupled KdV system and its stability. Symmetry, 12(3), 429. DOI 10.3390/sym12030429. [Google Scholar] [CrossRef]
7. Alharbi, A. R., Almatrafi, M. B. (2020). Analytical and numerical solutions for the variant Boussinseq equations. Journal of Taibah University for Science, 14(1), 454–462. DOI 10.1080/16583655.2020.1746575. [Google Scholar] [CrossRef]
8. Ghanbari, B., Yusuf, A., Inc, M., Baleanu, D. (2019). The new exact solitary wave solutions and stability analysis for the (2 + 1)-dimensional Zakharov–Kuznetsov equation. Advances in Difference Equations, 49(1), 1–15. DOI 10.1186/s13662-019-1964-0. [Google Scholar] [CrossRef]
9. Almatrafi, M. B., Alharbi, A. R., Tunç, C. (2020). Constructions of the soliton solutions to the good Boussinesq equation. Advances in Difference Equations, 2020(1), 629. DOI 10.1186/s13662-020-03089-8. [Google Scholar] [CrossRef]
10. Alharbi, A. R., Almatrafi, M. B., Seadawy, A. R. (2020). Construction of the numerical and analytical wave solutions of the Joseph-Egri dynamical equation for the long waves in nonlinear dispersive systems. International Journal of Modern Physics B, 34(30), 2050289. DOI 10.1142/S0217979220502896. [Google Scholar] [CrossRef]
11. Alharbi, A. R., Almatrafi, M. B., Lotfy, K. (2020). Constructions of solitary traveling wave solutions for ito integro-differential equation arising in plasma physics. Results in Physics, 19, 103533. DOI 10.1016/j.rinp.2020.103533. [Google Scholar] [CrossRef]
12. Alharbi, A., Almatrafi, M. B. (2020). Exact and numerical solitary wave structures to the variant Boussinesq system. Symmetry, 12(9), 1473. DOI 10.3390/sym12091473. [Google Scholar] [CrossRef]
13. Alharbi, A. R., Almatrafi, M. B. (2020). New exact and numerical solutions with their stability for ito integro-differential equation via Riccati–Bernoulli sub-ODE method. Journal of Taibah University for Science, 14(1), 1447–1456. DOI 10.1080/16583655.2020.1827853. [Google Scholar] [CrossRef]
14. Alharbi, A. R., Almatrafi, M. B. (2020). Numerical investigation of the dispersive long wave equation using an adaptive moving mesh method and its stability. Results in Physics, 16, 102870. DOI 10.1016/j.rinp.2019.102870. [Google Scholar] [CrossRef]
15. Alharbi, A. R., Almatrafi, M. B. (2020). Riccati-Bernoulli sub-ODE approach on the partial differential equations and applications. International Journal of Mathematics and Computer Science, 15(1), 367–388. [Google Scholar]
16. Jawad, A. J. M., Johnson, S., Yildirim, A. et al. (2013). Soliton solutions to coupled nonlinear wave equations in (2 + 1)-dimensions. Indian Journal of Physics, 87(3), 281–287. DOI 10.1007/s12648-012-0218-8. [Google Scholar] [CrossRef]
17. Alharbi, A., Almatrafi, M. B. (2022). Exact solitary wave and numericalsolutions for geophysical KdV equation. Journal of King Saud University-Science, 34(6), 102087. DOI 10.1016/j.jksus.2022.102087. [Google Scholar] [CrossRef]
18. Shao, Z. (2010). Global structure stability of Riemann solutions for linearly degenerate hyperbolic conservation laws under small BV perturbations of the initial data. Nonlinear Analysis: Real World Applications, 11(5), 3791–3808. DOI 10.1016/j.nonrwa.2010.02.009. [Google Scholar] [CrossRef]
19. Shao, Z. (2018). The Riemann problem for the relativistic full euler system with generalized chaplygin proper energy density-pressure relation. Zeitschrift für Angewandte Mathematik und Physik, 69(2), 1420–9039. DOI 10.1007/s00033-018-0937-6. [Google Scholar] [CrossRef]
20. Chen, Y., Li, B., Zhang, H. Q. (2003). Symbolic computation and construction of soliton-like solutions to the (2 + 1)-dimensional breaking soliton equation. Communications in Theoretical Physics, 40(6), 137. DOI 10.1088/0253-6102/40/2/137. [Google Scholar] [CrossRef]
21. Peng, Y. (2003). New exact solutions for (2 + 1)-dimensional breaking soliton equation. Communications in Theoretical Physics, 43(2), 205. DOI 10.1088/0253-6102/43/2/004. [Google Scholar] [CrossRef]
22. Abdelrahman, M. A. E., Alharbi, A. (2021). Analytical and numerical investigations of the modified camassa-holm equation. Pramana Journal, 95(3), 117. DOI 10.1007/s12043-021-02153-6. [Google Scholar] [CrossRef]
23. Brown, P. N., Hindmarsh, A. C., Petzold, L. E. (1994). Using Krylov methods in the solution of large-scale differential-algebraic systems. SIAM Journal on Scientific Computing, 15(6), 1467–1488. DOI 10.1137/0915088. [Google Scholar] [CrossRef]
24. Chandrasekhar, S. (1981). Hydrodynamic and hydromagnetic stability. New York, USA: Dover Publications Inc. [Google Scholar]
25. Brown, P. N., Hindmarsh, A. C., Petzold, L. R. (1994). Using Krylov methodsin the solution of large-scale differential-algebraic systems. Society for Industrial and Applied Mathematics Journal on Scientific Computing, 15(6), 1467–1488. DOI 10.1137/0915088. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools