
 Submit a Paper
Submit a Paper Propose a Special lssue
Propose a Special lssue Open Access
Open Access
ARTICLE
State Estimation Moving Window Gradient Iterative Algorithm for Bilinear Systems Using the Continuous Mixed p-norm Technique
Key Laboratory of Advanced Process Control for Light Industry (Ministry of Education), School of Internet of Things Engineering, Jiangnan University, Wuxi, 214122, China
* Corresponding Author: Weili Xiong. Email:
(This article belongs to the Special Issue: Advances on Modeling and State Estimation for Industrial Processes)
Computer Modeling in Engineering & Sciences 2023, 134(2), 873-892. https://doi.org/10.32604/cmes.2022.020565
Received 30 November 2021; Accepted 28 March 2022; Issue published 31 August 2022
 View Full Text
View Full Text Download PDF
Download PDFAbstract
This paper studies the parameter estimation problems of the nonlinear systems described by the bilinear state space models in the presence of disturbances. A bilinear state observer is designed for deriving identification algorithms to estimate the state variables using the input-output data. Based on the bilinear state observer, a novel gradient iterative algorithm is derived for estimating the parameters of the bilinear systems by means of the continuous mixed p-norm cost function. The gain at each iterative step adapts to the data quality so that the algorithm has good robustness to the noise disturbance. Furthermore, to improve the performance of the proposed algorithm, a dynamic moving window is designed which can update the dynamical data by removing the oldest data and adding the newest measurement data. A numerical example of identification of bilinear systems is presented to validate the theoretical analysis.Keywords
Although many physical dynamic behaviors are characterized as linear systems in the neighborhood of a single operating point, when they exhibit strong nonlinearities or must be described over the entire operating range, linear models may not yield appropriate results [1–3]. Owing to that, the study of system identification and parameter estimation for nonlinear systems has drawn considerable attention of academic researchers [4–6]. Various models are exploited to describe actual nonlinear systems with relatively simple structures [7–11] such as Hammerstein systems, Bilinear systems, and Wiener systems.
The parameter estimation of the system models is important for control system analysis and design. The parameters of the models can be estimated by using some identification methods [12–15] such as the hierarchical algorithms [16–19]. In this paper, we confine our discussion to bilinear systems, which are simplicity in model structures and capable of approaching arbitrary nonlinear systems with much higher accuracy than traditional linear approximations theoretically [20]. Bruni et al. designed a bilinear time-series model-based self-tuning controller for a multi-machine power system to enhance the region of stability of the system, and return the states to their stable equilibrium [21]. Yeo et al. developed the bilinear model predictive control algorithm for paper plant systems to control the grade change operations in paper production [22]. Wang et al. simulated the bridge nonlinear boundary as bilinear translational, and applied the nonlinear least squares optimization algorithm to identify the nonlinear translational and rotational boundary parameters of the bridge [23].
Many researches have been studied in the parameter estimation of bilinear state space systems. A stochastic gradient algorithm and a gradient-based iterative algorithm have been proposed for the parameter identification of bilinear systems by using the auxiliary model. The gradient-based iterative algorithm uses fixed batch data to update the parameters, so that the parameter estimation accuracy can be greatly improved compared with the stochastic gradient algorithm. Li et al. combined the maximum likelihood theory with the data filtering technique for bilinear systems with colored noises. The state observer is vital in the field of state estimation of bilinear systems [24]. Tsai considered a H-infinity fuzzy observer for bilinear systems by means of a linear matrix inequality approach [25]. Phan et al. presented a full-order bilinear state observer for the bilinear system, which optimized the observer gain by interaction matrices [26]. Zhang et al. considered the state estimation problem of bilinear systems and proposed a state filtering method for the single-input single-output bilinear systems and multiple-input multiple-output bilinear systems by minimizing the covariance matrix of the state estimation errors [27]. Recently, some state and parameter estimation methods have been proposed for linear and bilinear state space systems in the presence of exogenous noises [28–30].
However, in industrial applications, the dynamical processes often work on various noise environments, and some works used nonlinear filtering technique such as median filtering and least mean
Inspired by the above researches, we study the parameter estimation algorithms for bilinear state space models with the noise disturbances. Based on the iterative search and the state estimator, a bilinear state continues mixed
• A state observer is designed to obtain the system states variables consisting of the product terms of state variables and control variables.
• A bilinear state observer-based continues mixed
• A bilinear state observer-based moving window CMPN-GI (BSO-MW-CMPN-GI) algorithm is derived to update collected data and thus maintain high data utilization.
The outlines of this paper are organized as follows. Section 2 introduces some definitions and proposes the identification model of the bilinear state space system and introduces a bilinear state observer for the state estimation. Sections 3 and 4 derive a BSO-CMPN-GI and a MW-CMPN-GI algorithms based on the bilinear state estimator, respectively. An example to illustrate the effectiveness of the proposed algorithms in Section 5. Finally, Section 6 gives some concluding remarks.
2 System Description and Identification Model
Consider the following single-input single-output bilinear state space modelblue:
where
where
Assumption 1: The dimension n of the system state vector is known,
Assumption 2: The bilinear system in Eqs. (1) and (2) is observable and controllable.
Eq. (1) can be written as
Adding both sides of the above equations has
Substituting Eq. (5) into Eq. (2) obtains the regression form of the bilinear state model
Define the information vector
Redefine the noise term as
Eq. (6) can be rewritten as
The proposed parameter estimation algorithms in this paper are based on this identification model in (16). Many identification methods are derived based on the identification models of the systems [34–43] and these methods can be used to estimate the parameters of other linear systems and nonlinear systems [44–50] and can be applied to other fields such as chemical process control systems. The purpose of this paper is to obtain the estimates of the unknown parameters in the bilinear state space model by means of the measurement data
where
Remark 1: Differently from the identification of bilinear-in-parameter systems which involve the product terms of the parameter vectors and the information matrices, this paper studies the identification problem of bilinear state-space systems with the product terms of state variables and control variables, which makes it difficult for the parameter and state estimation.
3 Bilinear State Observer Based Continuous Mixed
Set the data length be L, based on the input and output data
To suppress the effect of noise interference, define the continuous mixed
where
Using the negative gradient search method to minimize the cost function
where
Therefore, Eq. (19) can be expressed as
where
Let
where
Eqs. (21) and (22) cannot figure out the parameter estimation vector
where
Replace the information matrix
To obtain a closed form formula for
The flowchart of the BSO-CMPN-GI algorithm in Eqs. (24)–(30) is shown in Fig. 1.
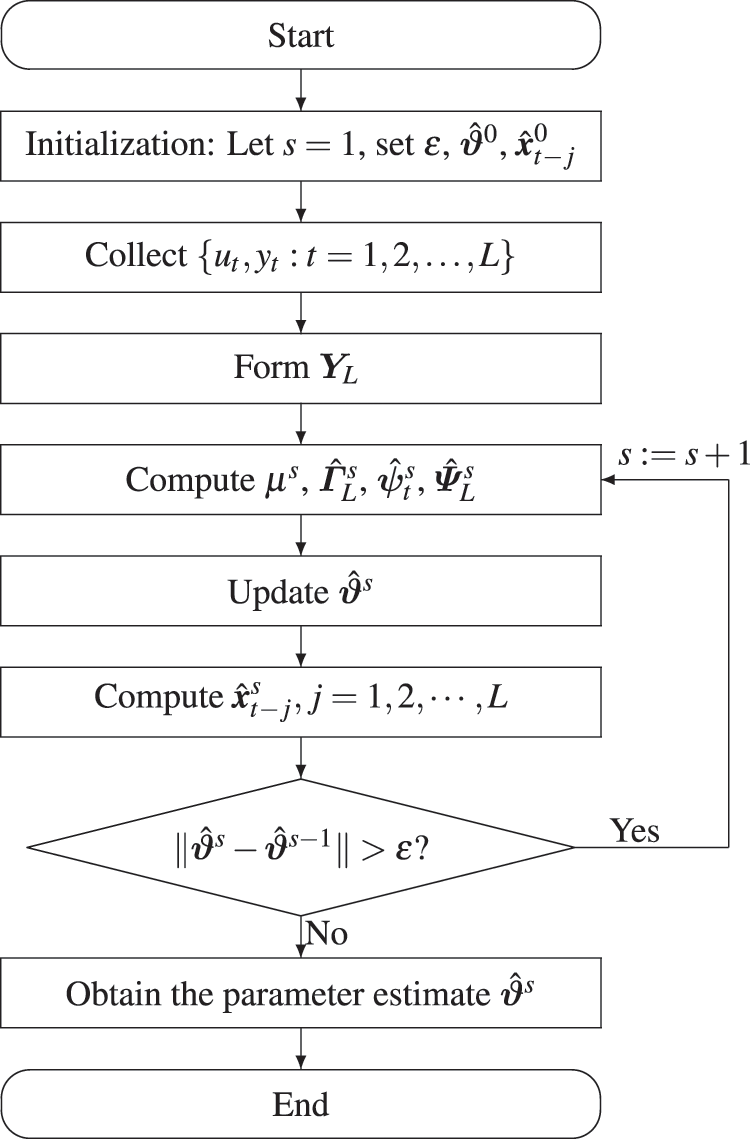
Figure 1: The flowchart of the BSO-CMPN-GI algorithm
Remark 2: The parameter p in BSO-CMPN-GI is adapted by continuous
Remark 3: The BSO-CMPN-GI algorithm makes full use of the measurement data in each iteration of the calculation process, but it requires a batch of data to be collected in advance, and thus is implemented offline. Therefore, an on-line identification algorithm derived from the BSO-CMPN-GI algorithm will be introduced by exploiting the past and current measurement data to estimate the unknown parameters in Section 4.
4 Bilinear State Observe Moving Window Continuous Mixed
In this section, we introduce the moving window method to derive an on-line identification algorithm and enhance the performance of the BSO-CMPN-GI algorithm. The length of the moving window is set as a fixed value m. Define the stacked output vector
Consider the measurements from
where
Taking the gradient of
where
Therefore, Eq. (4) can be expressed as
where
Let
where
As pointed earlier in Section 3, the unknown states
where
Based on the above derivation, a bilinear state observe-based moving window continuous mixed
The flowchart of the BSO-MW-CMPN-GI algorithm in Eqs. (39)–(45) is shown in Fig. 2.
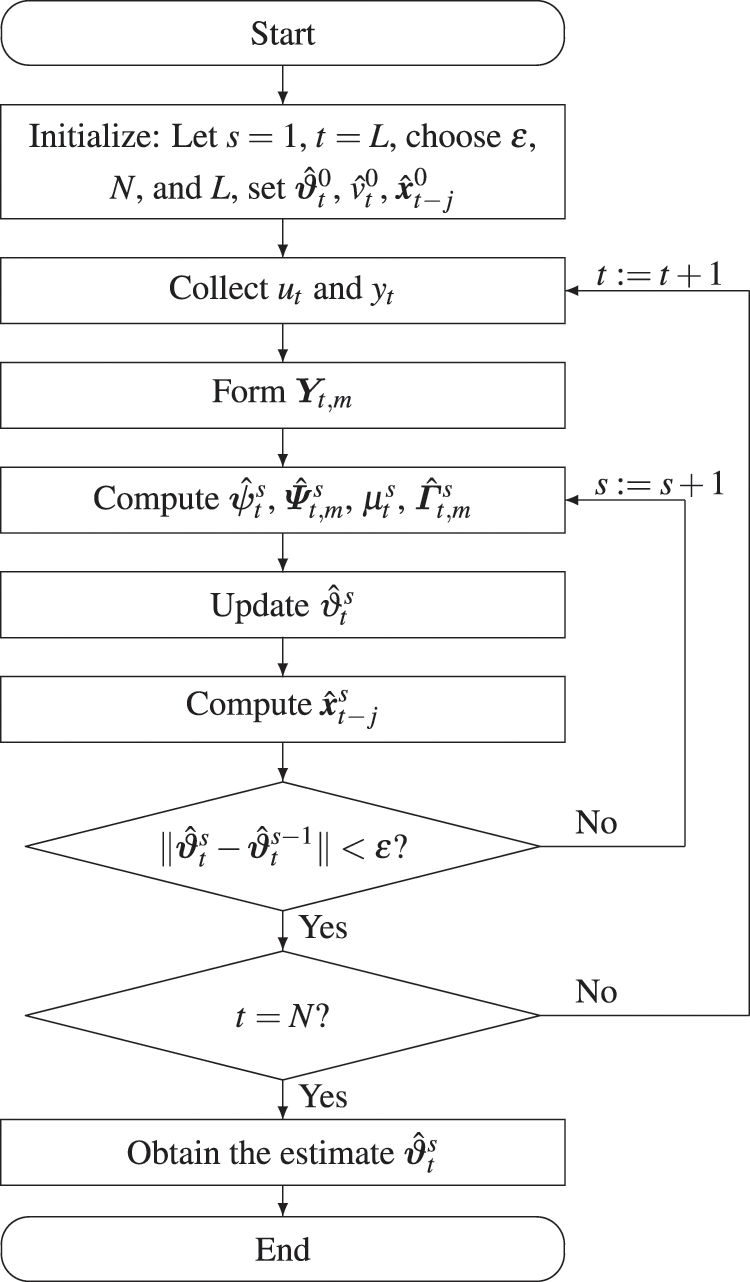
Figure 2: The flowchart of the BSO-MW-CMPN-GI algorithm for computing
Remark 4: The parameter estimate given by the BSO-MW-CMPN-GI algorithm depends only on the iterative counter s, but also time t. As the sampling time t increases, the BSO-MW-CMPN-GI algorithm can utilize a batch of data to calculate the parameter estimate simultaneously.
Case 1: About parameter estimation
Consider a second-order bilinear state space system:
The parameter vector to be estimated is
In simulation, the input
• The parameter estimation errors given by the BSO-GI algorithm, the BSO-CMPN-GI algorithm and the BSO-MW-CMPN-GI algorithm become smaller as the iteration s increases. It thus to say the proposed algorithms are effective for bilinear systems.
• The state estimates are close to their true values with t increasing.
• Under the same data length, a lower noise variance leads to higher parameter estimation accuracy by the BSO-GI algorithm, the BSO-CMPN-GI algorithm and the BSO-MW-CMPN-GI algorithm.
• The BSO-CMPN-GI algorithm and the BSO-MW-CMPN-GI algorithm possess higher parameter estimation accuracy at the same noise variance compared with the BSO-GI algorithm.
• When comparing the BSO-CMPN-GI algorithm and the BSO-MW-CMPN-GI algorithm, the parameter estimation errors of the BSO-MW-CMPN-GI algorithm become smaller with m increasing, and approach to zero if m is large enough.
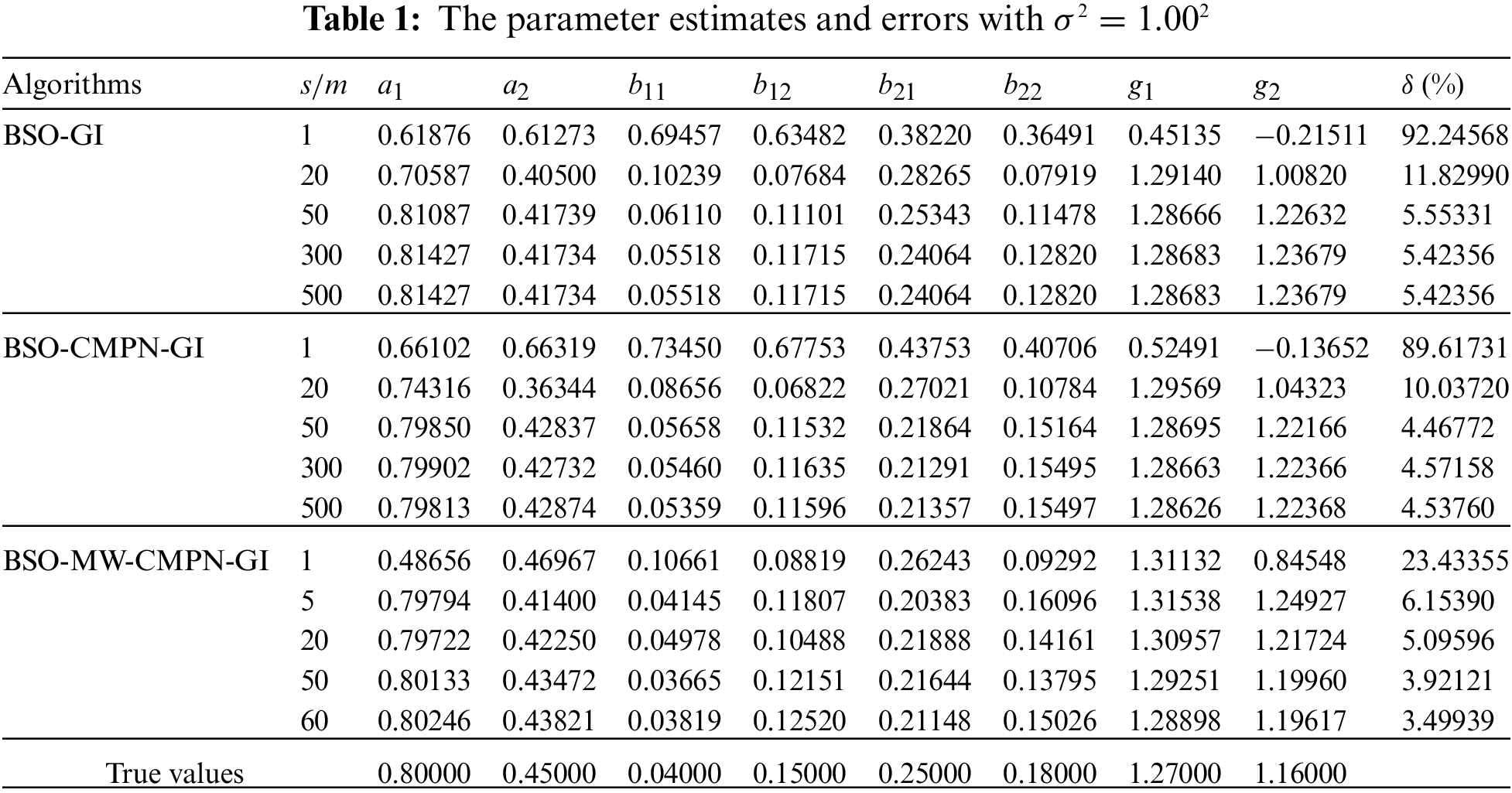
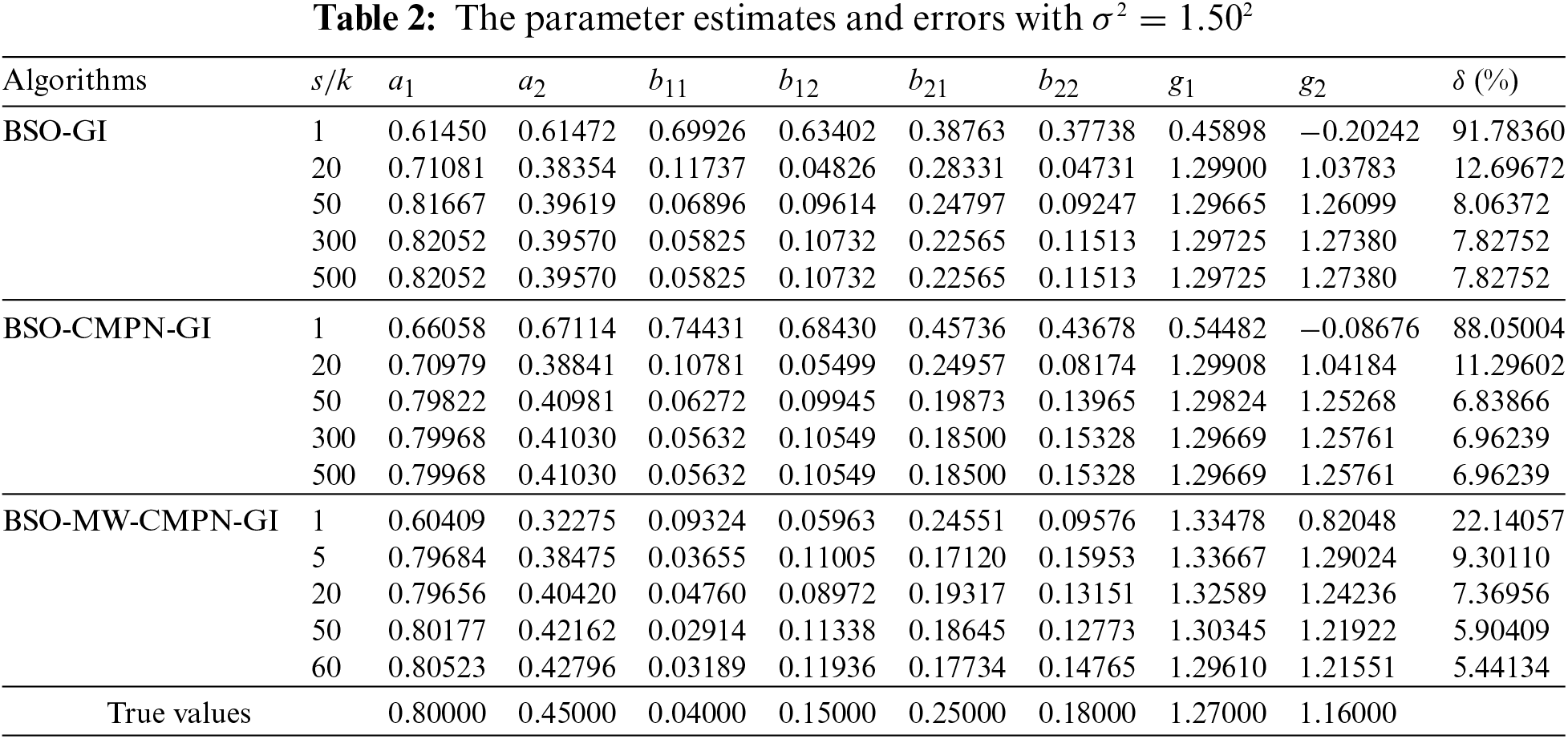
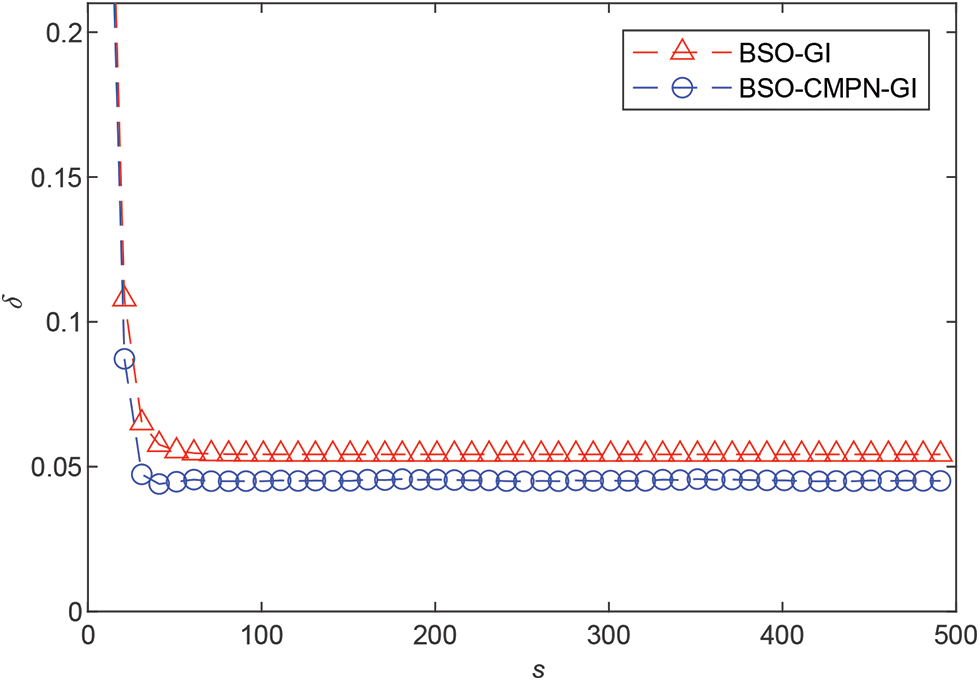
Figure 3: The estimation errors
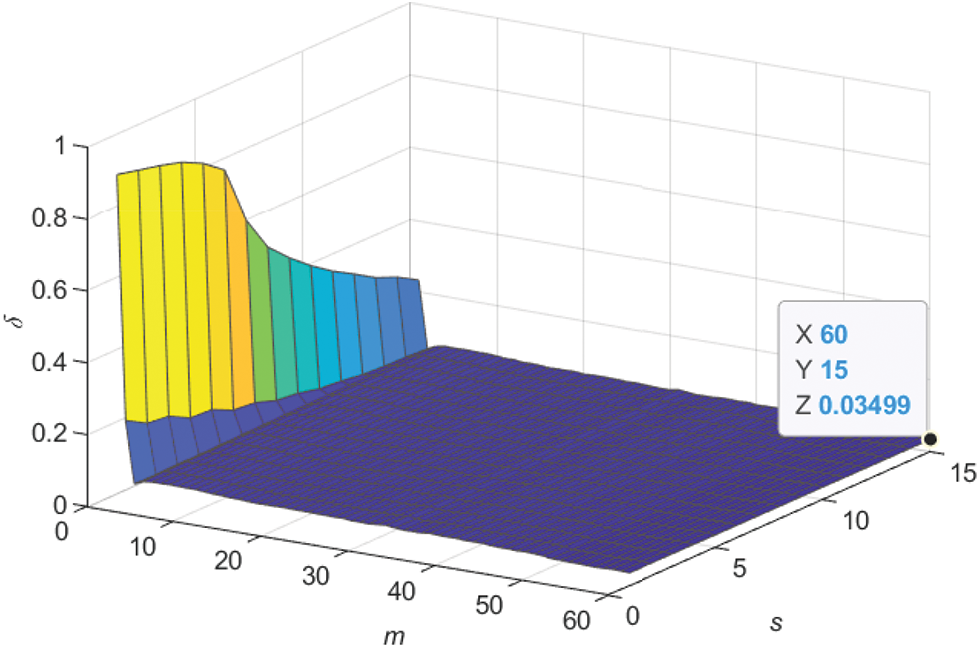
Figure 4: The BSO-MW-CMPN-GI estimation errors
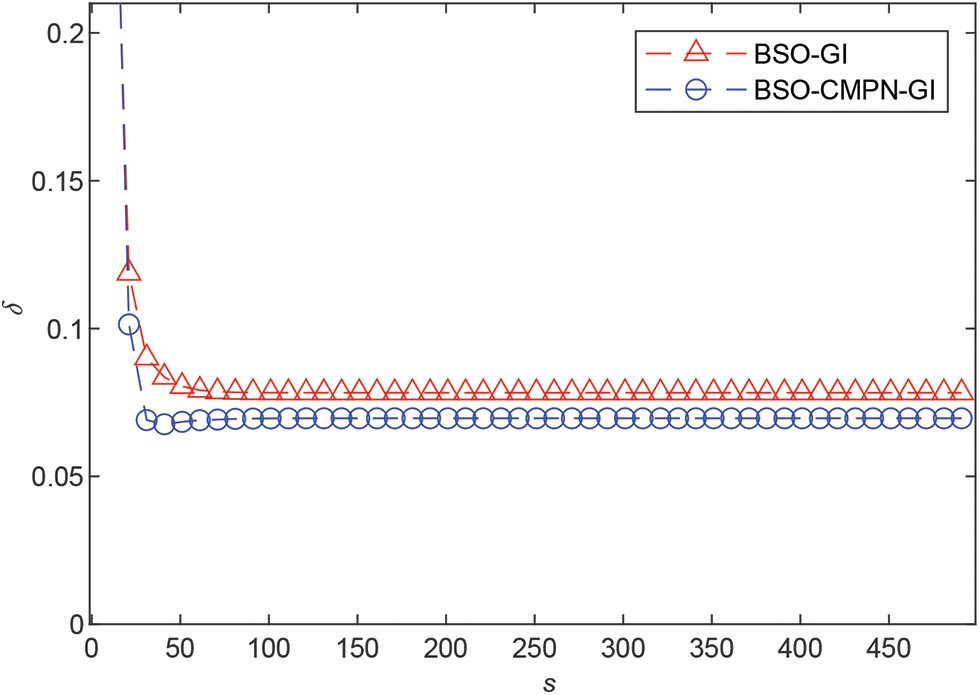
Figure 5: The estimation errors
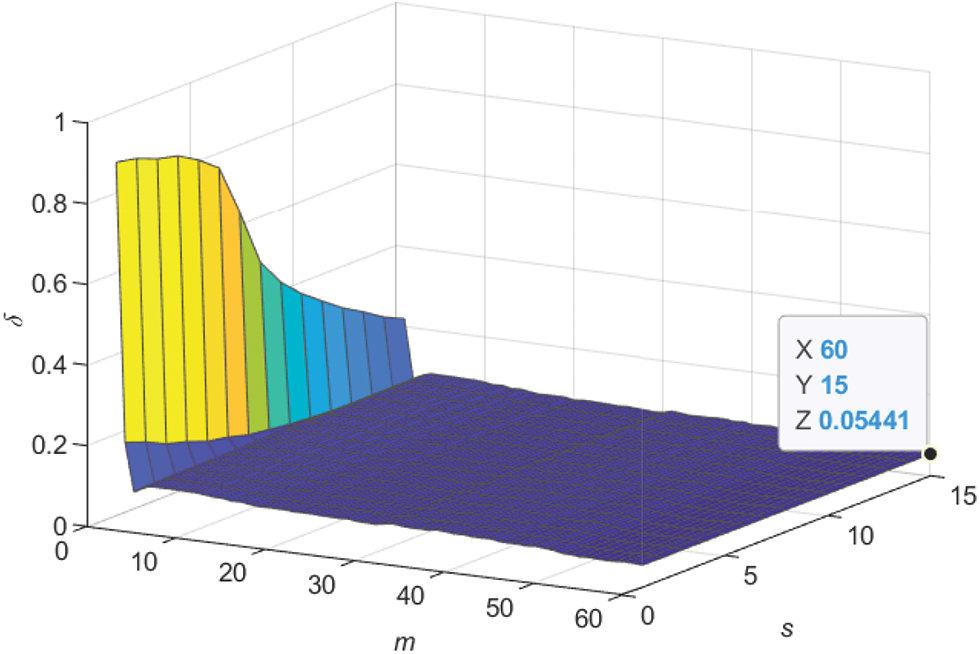
Figure 6: The BSO-MW-CMPN-GI estimation errors
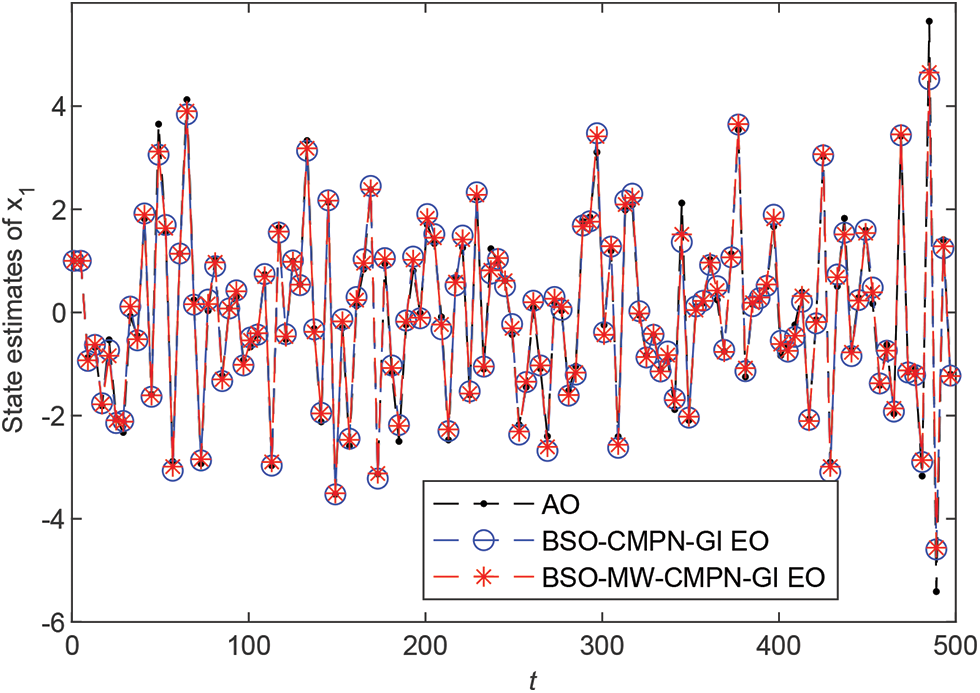
Figure 7: State
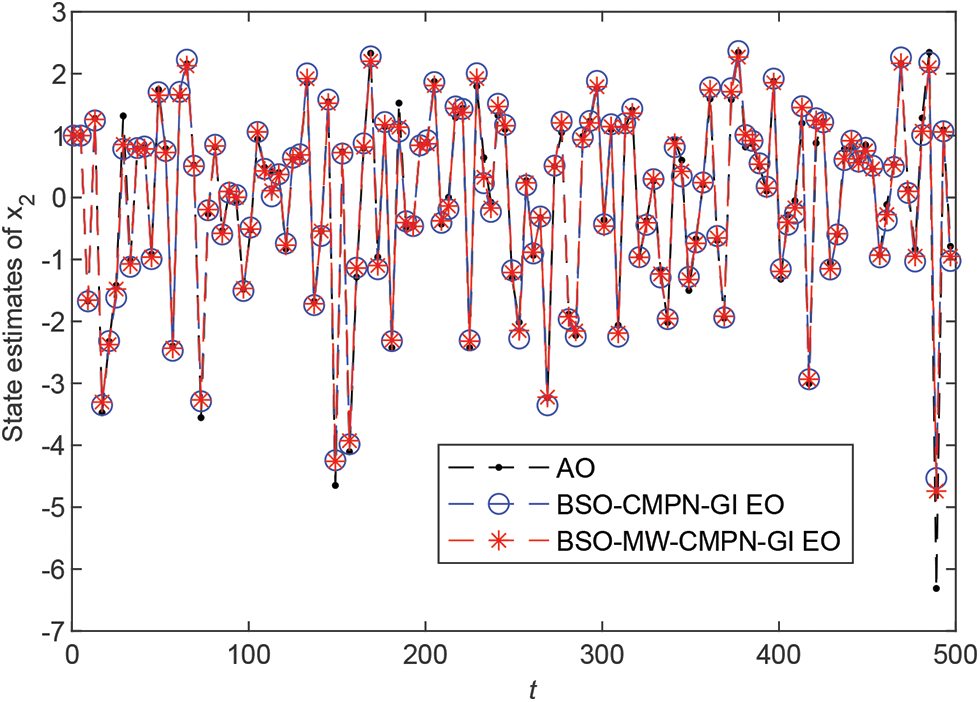
Figure 8: State
Case 2: About model validation
Applying the BSO-CMPN-GI algorithm and the BSO-MW-CMPN-GI algorithm to construct the estimated model for the model validation, respectively. Take the data from
where
From Fig. 9, we can see that the predicted outputs of the BSO-CMPN-GI and the BSO-MW-CMPN-GI are very close to the true outputs, and the RMSEs of the two algorithms are very close to the noise standard deviation
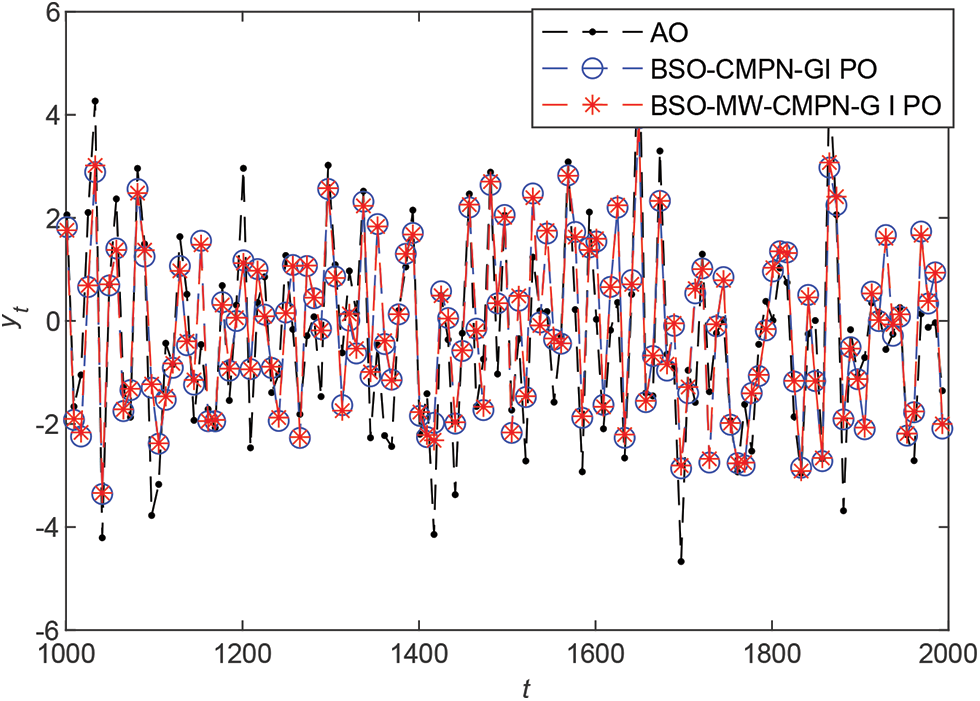
Figure 9: The system actual outputs and the predicted outputs vs. t with
This paper studies the parameter identification problems of the nonlinear systems described by the bilinear state space models with the noise disturbances. A bilinear state observe-based continuous mixed
Funding Statement: This research was funded by the National Natural Science Foundation of China (No. 61773182) and the 111 Project (B12018).
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
References
1. Xu, L. (2022). Separable multi-innovation newton iterative modeling algorithm for multi-frequency signals based on the sliding measurement window. Circuits Systems and Signal Processing, 41(2), 805–830. DOI 10.1007/s00034-021-01801-x. [Google Scholar] [CrossRef]
2. Xu, L. (2022). Separable newton recursive estimation method through system responses based on dynamically discrete measurements with increasing data length. International Journal of Control Automation and Systems, 20(2), 432–443. DOI 10.1007/s12555-020-0619-y. [Google Scholar] [CrossRef]
3. Zhang, X., Liu, Q., Hayat, T. (2020). Recursive identification of bilinear time-delay systems through the redundant rule. Journal of the Franklin Institute, 357(1), 726–747. DOI 10.1016/j.jfranklin.2019.11.003. [Google Scholar] [CrossRef]
4. Gan, M., Chen, G., Chen, L., Chen, C. (2020). Term selection for a class of separable nonlinear models. IEEE Transactions on Neural Networks and Learning Systems, 31(2), 445–451. DOI 10.1109/TNNLS.5962385. [Google Scholar] [CrossRef]
5. Ding, F. (2013). Coupled-least-squares identification for multivariable systems. IET Control Theory and Applications, 7(1), 68–79. DOI 10.1049/iet-cta.2012.0171. [Google Scholar] [CrossRef]
6. Ding, F., Liu, X. G., Chu, J. (2013). Gradient-based and least-squares-based iterative algorithms for hammerstein systems using the hierarchical identification principle. IET Control Theory and Applications, 7(2), 176–184. DOI 10.1049/iet-cta.2012.0313. [Google Scholar] [CrossRef]
7. Zhao, Y. B., Liu, G. P., Rees, D. (2008). A predictive control-based approach to networked hammerstein systems: Design and stability analysis. IEEE Transactions on Cybernetics, 38(3), 700–708. DOI 10.1109/TSMCB.2008.918572. [Google Scholar] [CrossRef]
8. Mahata, K., Schoukens, J., de Cock, A. (2016). Information matrix and D-optimal design with Gaussian inputs for wiener model identification. Automatica, 69, 65–77. DOI 10.1016/j.automatica.2016.02.026. [Google Scholar] [CrossRef]
9. Wang, Y. J., Tang, S. H., Gu, X. B. (2022). Parameter estimation for nonlinear volterra systems by using the multi-innovation identification theory and tensor decomposition. Journal of the Franklin Institute, 359(2), 1782–1802. DOI 10.1016/j.jfranklin.2021.11.015. [Google Scholar] [CrossRef]
10. Xu, L., Song, G. L. (2020). A recursive parameter estimation algorithm for modeling signals with multi-frequencies. Circuits Systems and Signal Processing, 39(8), 4198–4224. DOI 10.1007/s00034-020-01356-3. [Google Scholar] [CrossRef]
11. Wang, Y. J., Yang, L. (2021). An efficient recursive identification algorithm for multilinear systems based on tensor decomposition. International Journal of Robust and Nonlinear Control, 31(11), 7920–7936. DOI 10.1002/rnc.5718. [Google Scholar] [CrossRef]
12. Ding, F., Zhang, X., Xu, L. (2019). The innovation algorithms for multivariable state-space models. International Journal of Adaptive Control and Signal Processing, 33(11), 1601–1608. DOI 10.1002/acs.3053. [Google Scholar] [CrossRef]
13. Ding, F., Liu, G., Liu, X. P. (2011). Parameter estimation with scarce measurements. Automatica, 47(11), 1646–1655. DOI 10.1016/j.automatica.2011.05.007. [Google Scholar] [CrossRef]
14. Liu, Y. J., Shi, Y. (2014). An efficient hierarchical identification method for general dual-rate sampled-data systems. Automatica, 50(3), 962–970. DOI 10.1016/j.automatica.2013.12.025. [Google Scholar] [CrossRef]
15. Zhang, X. (2022). Optimal adaptive filtering algorithm by using the fractional-order derivative. IEEE Signal Processing Letters, 29, 399–403. DOI 10.1109/LSP.2021.3136504. [Google Scholar] [CrossRef]
16. Ding, J., Liu, X. P., Liu, G. (2011). Hierarchical least squares identification for linear SISO systems with dual-rate sampled-data. IEEE Transactions on Automatic Control, 56(11), 2677–2683. DOI 10.1109/TAC.2011.2158137. [Google Scholar] [CrossRef]
17. Ding, F., Liu, Y. J., Bao, B. (2012). Gradient based and least squares based iterative estimation algorithms for multi-input multi-output systems. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 226(1), 43–55. DOI 10.1177/0959651811409491. [Google Scholar] [CrossRef]
18. Xu, L., Chen, F. Y., Hayat, T. (2021). Hierarchical recursive signal modeling for multi-frequency signals based on discrete measured data. International Journal of Adaptive Control and Signal Processing, 35(5), 676–693. DOI 10.1002/acs.3221. [Google Scholar] [CrossRef]
19. Wang, Y. J. (2016). Novel data filtering based parameter identification for multiple-input multiple-output systems using the auxiliary model. Automatica, 71, 308–313. DOI 10.1016/j.automatica.2016.05.024. [Google Scholar] [CrossRef]
20. Mohler, R. R., Kolodziej, W. J. (2007). An overview of bilinear system theory and applications. IEEE Transactions on Systems Man and Cybernetics, 10(10), 683–688. DOI 10.1109/TSMC.1980.4308378. [Google Scholar] [CrossRef]
21. Bruni, C., Dipillo, G., Koch, G. (2003). Bilinear systems: An appealing class of “nearly linear” systems in theory and applications. IEEE Transactions on Automatic Control, 19(4), 334–348. DOI 10.1109/TAC.1974.1100617. [Google Scholar] [CrossRef]
22. Yeo, Y. K., Choo, Y. U. (2006). Bilinear model predictive control of grade change operations in paper production plants. Korean Journal of Chemical Engineering, 23(2), 167–170. DOI 10.1007/BF02705710. [Google Scholar] [CrossRef]
23. Wang, Z. C., Zha, G. P., Ren, W. X. (2018). Nonlinear boundary parameter identification of bridges based on temperature-induced strains. Structural Engineering and Mechanics, 68(5), 563–573. DOI 10.12989/sem.2018.68.5.563. [Google Scholar] [CrossRef]
24. Li, M., Liu, X. (2020). Maximum likelihood least squares based iterative estimation for a class of bilinear systems using the data filtering technique. International Journal of Control Automation and Systems, 18(6), 1581–1592. DOI 10.1007/s12555-019-0191-5. [Google Scholar] [CrossRef]
25. Tsai, S. H. (2012). A global exponential fuzzy observer design for time-delay takagi-sugeno uncertain discrete fuzzy bilinear systems with disturbance. IEEE Transactions on Fuzzy Systems, 20(6), 1063–1075. DOI 10.1109/TFUZZ.2012.2192936. [Google Scholar] [CrossRef]
26. Phan, M. Q., Vicario, F., Longman, R. W., Betti, R. (2015). Optimal bilinear observers for bilinear state-space models by interaction matrices. International Journal of Control, 88(8), 1504–1522. DOI 10.1080/00207179.2015.1007530. [Google Scholar] [CrossRef]
27. Zhang, X., Yang, E. (2019). State estimation for bilinear systems through minimizing the covariance matrix of the state estimation errors. International Journal of Adaptive Control and Signal Processing, 33(7), 1157–1173. DOI 10.1002/acs.3027. [Google Scholar] [CrossRef]
28. Zhang, X. (2020). Adaptive parameter estimation for a general dynamical system with unknown states. International Journal of Robust and Nonlinear Control, 30(4), 1351–1372. DOI 10.1002/rnc.4819. [Google Scholar] [CrossRef]
29. Zhang, X. (2020). Recursive parameter estimation methods and convergence analysis for a special class of nonlinear systems. International Journal of Robust and Nonlinear Control, 30(4), 1373–1393. DOI 10.1002/rnc.4824. [Google Scholar] [CrossRef]
30. Zhang, X. (2020). Recursive parameter estimation and its convergence for bilinear systems. IET Control Theory and Applications, 14(5), 677–688. DOI 10.1049/iet-cta.2019.0413. [Google Scholar] [CrossRef]
31. Zayyani, H. (2014). Continuous mixed p-norm adaptive algorithm for system identification. IEEE Signal Process Letters, 21(9), 1108–1110. DOI 10.1109/LSP.2014.2325495. [Google Scholar] [CrossRef]
32. Shi, L., Zhao, H., Zakharov, Y. (2019). Generalized variable step size continuous mixed
33. Shi, L., Zhao, H. (2021). Generalized variable step-size diffusion continuous mixed
34. Ding, F., Chen, T. (2004). Combined parameter and output estimation of dual-rate systems using an auxiliary model. Automatica, 40(9), 1739–1748. DOI 10.1016/j.automatica.2004.05.001. [Google Scholar] [CrossRef]
35. Ding, F., Chen, T. (2005). Parameter estimation of dual-rate stochastic systems by using an output error method. IEEE Transactions on Automatic Control, 50(9), 1436–1441. DOI 10.1109/TAC.2005.854654. [Google Scholar] [CrossRef]
36. Ding, F., Shi, Y., Chen, T. (2017). Auxiliary model-based least-squares identification methods for hammerstein output-error systems. Systems & Control Letters, 56(7), 373–380. DOI 10.1016/j.sysconle.2006.10.026. [Google Scholar] [CrossRef]
37. Ji, Y., Kang, Z., Zhang, C. (2021). Two-stage gradient-based recursive estimation for nonlinear models by using the data filtering. International Journal of Control Automation and Systems, 19(8), 2706–2715. DOI 10.1007/s12555-019-1060-y. [Google Scholar] [CrossRef]
38. Wang, J. W., Ji, Y., Zhang, C. (2021). Iterative parameter and order identification for fractional-order nonlinear finite impulse response systems using the key term separation. International Journal of Adaptive Control and Signal Processing, 35(8), 1562–1577. DOI 10.1002/acs.3257. [Google Scholar] [CrossRef]
39. Li, M. H., Liu, X. M. (2021). Iterative identification methods for a class of bilinear systems by using the particle filtering technique. International Journal of Adaptive Control and Signal Processing, 35(10), 2056–2074. DOI 10.1002/acs.3308. [Google Scholar] [CrossRef]
40. Zhou, Y. H. (2020). Modeling nonlinear processes using the radial basis function-based state-dependent autoregressive models. IEEE Signal Processing Letters, 27, 1600–1604. DOI 10.1109/LSP.2020.3021925. [Google Scholar] [CrossRef]
41. Zhou, Y. H., Zhang, X. (2022). Partially-coupled nonlinear parameter optimization algorithm for a class of multivariate hybrid models. Applied Mathematics and Computation, 414, 126663. DOI 10.1016/j.amc.2021.126663. [Google Scholar] [CrossRef]
42. Zhou, Y. H., Zhang, X. (2021). Hierarchical estimation approach for RBF-AR models with regression weights based on the increasing data length. IEEE Transactions on Circuits and Systems II: Express Briefs, 68(12), 3597–3601. DOI 10.1109/TCSII.2021.3076112. [Google Scholar] [CrossRef]
43. Li, M. H., Liu, X. M. (2021). Maximum likelihood hierarchical least squares-based iterative identification for dual-rate stochastic systems. International Journal of Adaptive Control and Signal Processing, 35(2), 240–261. DOI 10.1002/acs.3203. [Google Scholar] [CrossRef]
44. Ding, F., Shi, Y., Chen, T. (2006). Performance analysis of estimation algorithms of non-stationary ARMA processes. IEEE Transactions on Signal Processing, 54(3), 1041–1053. DOI 10.1109/TSP.2005.862845. [Google Scholar] [CrossRef]
45. Wan, L. J. (2019). Decomposition-and gradient-based iterative identification algorithms for multivariable systems using the multi-innovation theory. Circuits Systems and Signal Processing, 38(7), 2971–2991. DOI 10.1007/s00034-018-1014-2. [Google Scholar] [CrossRef]
46. Wang, X. H. (2022). Modified particle filtering-based robust estimation for a networked control system corrupted by impulsive noise. International Journal of Robust and Nonlinear Control, 32(2), 830–850. DOI 10.1002/rnc.5850. [Google Scholar] [CrossRef]
47. Hou, J., Chen, F. W., Li, P. H., Zhu, Z. Q. (2021). Gray-box parsimonious subspace identification of hammerstein-type systems. IEEE Transactions on Industrial Electronics, 68(10), 9941–9951. DOI 10.1109/TIE.2020.3026286. [Google Scholar] [CrossRef]
48. Ding, F., Liu, G., Liu, X. P. (2011). Partially coupled stochastic gradient identification methods for non-uniformly sampled systems. IEEE Transactions on Automatic Control, 55(8), 1976–1981. DOI 10.1109/TAC.2010.2050713. [Google Scholar] [CrossRef]
49. Zhao, Z., Zhou, Y., Wang, X., Wang, Z., Bai, Y. (2022). Water quality evolution mechanism modeling and health risk assessment based on stochastic hybrid dynamic systems. Expert Systems with Applications, 193, 116404. DOI 10.1016/j.eswa.2021.116404. [Google Scholar] [CrossRef]
50. Zhao, Z., Zhou, Y., Wang, X., Wang, Z., Bai, Y. (2022). Microbiological predictive modeling and risk analysis based on the one-step kinetic integrated wiener process. Innovative Food Science & Emerging Technologies, 75, 102912. DOI 10.1016/j.ifset.2021.102912. [Google Scholar] [CrossRef]
51. Zhang, X. (2020). Hierarchical parameter and state estimation for bilinear systems. International Journal of Systems Science, 51(2), 275–290. DOI 10.1080/00207721.2019.1704093. [Google Scholar] [CrossRef]
52. Pan, J., Jiang, X., Ding, W. (2017). A filtering based multi-innovation extended stochastic gradient algorithm for multivariable control systems. International Journal of Control Automation and Systems, 15(3), 1189–1197. DOI 10.1007/s12555-016-0081-z. [Google Scholar] [CrossRef]
53. Ding, F., Lv, L., Pan, J., Wan, X., Jin, X. B. (2020). Two-stage gradient-based iterative estimation methods for controlled autoregressive systems using the measurement data. International Journal of Control Automation and Systems, 18(4), 886–896. DOI 10.1007/s12555-019-0140-3. [Google Scholar] [CrossRef]
54. Ding, F., Wang, F. F., Wu, M. H. (2017). Decomposition based least squares iterative identification algorithm for multivariate pseudo-linear ARMA systems using the data filtering. Journal of the Franklin Institute, 354(3), 1321–1339. DOI 10.1016/j.jfranklin.2016.11.030. [Google Scholar] [CrossRef]
55. Pan, J., Ma, H., Liu, Q. Y. (2020). Recursive coupled projection algorithms for multivariable output-error-like systems with coloured noises. IET Signal Processing, 14(7), 455–466. DOI 10.1049/iet-spr.2019.0481. [Google Scholar] [CrossRef]
56. Xu, L., Zhu, Q. M. (2021). Decomposition strategy-based hierarchical least mean square algorithm for control systems from the impulse responses. International Journal of Systems Science, 52(9), 1806–1821. DOI 10.1080/00207721.2020.1871107. [Google Scholar] [CrossRef]
57. Zhang, X., Xu, L., Hayat, T. (2018). Combined state and parameter estimation for a bilinear state space system with moving average noise. Journal of the Franklin Institute, 355(6), 3079–3103. DOI 10.1016/j.jfranklin.2018.01.011. [Google Scholar] [CrossRef]
58. Li, X. Y., Wu, B. Y. (2022). A kernel regression approach for identification of first order differential equations based on functional data. Applied Mathematics Letters, 127, 107832. DOI 10.1016/j.aml.2021.107832. [Google Scholar] [CrossRef]
59. Geng, F. Z., Wu, X. Y. (2021). Reproducing kernel functions based univariate spline interpolation. Applied Mathematics Letters, 122, 107525. DOI 10.1016/j.aml.2021.107525. [Google Scholar] [CrossRef]
60. Li, X. Y., Wu, B. Y. (2021). Superconvergent kernel functions approaches for the second kind fredholm integral equations. Applied Numerical Mathematics, 167, 202–210. DOI 10.1016/j.apnum.2021.05.004. [Google Scholar] [CrossRef]
61. Pan, J., Li, W., Zhang, H. P. (2018). Control algorithms of magnetic suspension systems based on the improved double exponential reaching law of sliding mode control. International Journal of Control Automation and Systems, 16(6), 2878–2887. DOI 10.1007/s12555-017-0616-y. [Google Scholar] [CrossRef]
62. Ma, H., Pan, J., Ding, W. (2019). Partially-coupled least squares based iterative parameter estimation for multi-variable output-error-like autoregressive moving average systems. IET Control Theory and Applications, 13(8), 3040–3051. DOI 10.1049/iet-cta.2019.0112. [Google Scholar] [CrossRef]
63. Ding, F., Liu, X. P., Yang, H. Z. (2008). Parameter identification and intersample output estimation for dual-rate systems. IEEE Transactions on Systems, Man, and Cybernetics--Part A: Systems and Humans, 38(4), 966–975. DOI 10.1109/TSMCA.2008.923030. [Google Scholar] [CrossRef]
64. Ding, F., Liu, X. P., Liu, G. (2010). Multiinnovation least squares identification for linear and pseudo-linear regression models. IEEE Transactions on Systems, Man, and Cybernetics--Part B: Cybernetics, 40(3), 767–778. DOI 10.1109/TSMCB.2009.2028871. [Google Scholar] [CrossRef]
65. Xu, L., Sheng, J. (2020). Separable multi-innovation stochastic gradient estimation algorithm for the nonlinear dynamic responses of systems. International Journal of Adaptive Control and Signal Processing, 34(7), 937–954. DOI 10.1002/acs.3113. [Google Scholar] [CrossRef]
66. Wang, Y. J., Wu, M. H. (2018). Recursive parameter estimation algorithm for multivariate output-error systems. Journal of the Franklin Institute, 355(12), 5163–5181. DOI 10.1016/j.jfranklin.2018.04.013. [Google Scholar] [CrossRef]
67. Xu, L., Yang, E. F. (2021). Auxiliary model multiinnovation stochastic gradient parameter estimation methods for nonlinear sandwich systems. International Journal of Robust and Nonlinear Control, 31(1), 148–165. DOI 10.1002/rnc.5266. [Google Scholar] [CrossRef]
68. Liu, S. Y., Hayat, T. (2019). Hierarchical principle-based iterative parameter estimation algorithm for dual-frequency signals. Circuits Systems and Signal Processing, 38(7), 3251–3268. DOI 10.1007/s00034-018-1015-1. [Google Scholar] [CrossRef]
69. Zhao, G., Cao, T., Wang, Y., Zhou, H., Zhang, C. (2021). Optimal sizing of isolated microgrid containing photovoltaic/photothermal/wind/diesel/battery. International Journal of Photoenergy, 2021, 5566597. DOI 10.1155/2021/5566597. [Google Scholar] [CrossRef]
70. Wang, X., Zhao, M., Zhou, Y., Wan, Z., Xu, W. (2021). Design and analysis for multi-disc coreless axial-flux permanent-magnet synchronous machine. IEEE Transactions on Applied Superconductivity, 31(8), 1–4. DOI 10.1109/TASC.2021.3091078. [Google Scholar] [CrossRef]
71. Wang, X., Wan, Z., Tang, L., Xu, W., Zhao, M. (2021). Electromagnetic performance analysis of an axial flux hybrid excitation motor for HEV drives. IEEE Transactions on Applied Superconductivity, 31(8), 1–5. DOI 10.1109/TASC.2021.3101785. [Google Scholar] [CrossRef]
72. Li, M., Xu, G., Lai, Q., Chen, J. (2022). A chaotic strategy-based quadratic opposition-based learning adaptive variable-speed whale optimization algorithm. Mathematics and Computers in Simulation, 193, 71–99. DOI 10.1016/j.matcom.2021.10.003. [Google Scholar] [CrossRef]
73. Shu, J., He, J. C., Li, L. (2022). MSIS: Multispectral instance segmentation method for power equipment. Computational Intelligence and Neuroscience, 2022. DOI 10.1155/2022/2864717. [Google Scholar] [CrossRef]
74. Peng, H., He, W., Zhang, Y., Li, X., Ding, Y. (2022). Covert non-orthogonal multiple access communication assisted by multi-antenna jamming author links open overlay. Physical Communication, 2022. DOI 10.1016/j.phycom.2022.101598. [Google Scholar] [CrossRef]
Cite This Article
 Copyright © 2023 The Author(s). Published by Tech Science Press.
Copyright © 2023 The Author(s). Published by Tech Science Press.This work is licensed under a Creative Commons Attribution 4.0 International License , which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
 Downloads
Downloads
 Citation Tools
Citation Tools