Engineering & Sciences
| Computer Modeling in Engineering & Sciences |
DOI: 10.32604/cmes.2021.014460
ARTICLE
Solution and Analysis of the Fuzzy Volterra Integral Equations via Homotopy Analysis Method
1School of Quantitative Sciences, Universiti Utara Malaysia, Kedah, Sintok, 06010, Malaysia
2Department of Mathematics, Faculty of Science and Technology, Irbid National University, Irbid, 2600, Jordan
3Department of Mathematics, Faculty of Science, Yarmouk University, Irbid, 21163, Jordan
*Corresponding Author: Ali. F. Jameel. Email: alifareed@uum.edu.my
Received: 29 September 2020; Accepted: 25 February 2021
Abstract: Homotopy Analysis Method (HAM) is semi-analytic method to solve the linear and nonlinear mathematical models which can be used to obtain the approximate solution. The HAM includes an auxiliary parameter, which is an efficient way to examine and analyze the accuracy of linear and nonlinear problems. The main aim of this work is to explore the approximate solutions of fuzzy Volterra integral equations (both linear and nonlinear) with a separable kernel via HAM. This method provides a reliable way to ensure the convergence of the approximation series. A new general form of HAM is presented and analyzed in the fuzzy domain. A qualitative convergence analysis based on the graphical method of a fuzzy HAM is discussed. The solutions sought by the proposed method show that the HAM is easy to implement and computationally quite attractive. Some solutions of fuzzy second kind Volterra integral equations are solved as numerical examples to show the potential of the method. The results also show that HAM provides an easy way to control and modify the convergence area in order to obtain accurate solutions.
Keywords: Homotopy analysis method; convergence control parameter; fuzzy Volterra integral equations
Integral equations have been used to model problems in a number of fields [1–4]. In real-world problems, inaccuracy, uncertainty and lack of information exist and are discussed both theoretically and numerically. The way to address this lack of information is to model uncertainty as fuzziness [5]. It is therefore possible to refer to fuzzy integral equations rather than to use deterministic models in the crisp domain. In order to study and solve many of the problems in applied mathematics, integral equations in fuzzy form are important, particularly for physics, for medical modelling [6]. In many applications, certain problem parameters are typically defined by a fuzzy number rather than a crisp number, and it is therefore important to establish mathematical models and numerical procedures for the proper handling of fuzzy integral equations. Numerical approaches to fuzzy integral equations have inspired many research works in the last decade due to their use in scientific phenomena [7–11]. The existence and uniqueness of a second kind fuzzy Volterra equation solution was introduced in [12]. Among the approximate methods for fuzzy Volterra integral equations, there are the Differential Transform Method (DTM) to obtain analytical solution of linear fuzzy Volterra integral equations of second kind [13], Homotopy Perturbation Method (HPM) for solving linear and nonlinear fuzzy Volterra integral equations of second kind [14,15] and Variational Iteration Method (VIM) together with Taylor method to solve linear fuzzy Volterra integral equations of second kind [16]. The main application of fuzzy integral equations is biomathematical modelling. For example, a model based on fuzzy integral equations [16] was proposed to study the dynamics of diseases transmitted through direct contact between susceptible and infected individuals. Solving mathematical problems with approximation methods usually lead to approaches in series or polynomial functions which often have a better interpretability and this can contribute to pave the way to future processes and solutions of given problems, without the shortcoming of a suitable discretization. In the 90s, Liao introduced a new approximation approach called homotopy analysis method [17]. The approximate solution is obtained as an infinite series function that has been shown to converge to the exact solution in many mathematical problems involving engineering applications [18–22]. The homotopy, a fundamental concept in topology, is a landmark of the approximation methods, since it provides more flexibility in handling the equations and their solution [23]. The validity of HAM depends on homotopy topology, regardless of the physical parameters. It is worth recalling that the Adomian Decomposition Method (ADM) and the VIM are non-perturbation techniques, which do not depend on a series of physical parameters, but such non-perturbation techniques in some cases do not guarantee the convergence of the solution series [24]. The HAM also allows to select the proper base function without any constraint to approximate the solution of some nonlinear problems [25].
The difference between HAM and other approximation methods is the auxiliary convergence control parameter, denoted by h, that can optimize and rate the convergence of the method per order of solution [26]. In HAM the selections of proper initial approximation, operator and auxiliary function with the optimal value of h allows to solve the deformation equations and develop a solution series [20].
To control the error of HAM solution, there is a convergence-control parameter, whose value, if properly selected, can lead to an accurate convergent series or faster convergence [27]. Van Gorder et al. [28] discussed the application of HAM for nonlinear ordinary differential equation and the effectiveness of a suitable choice of initial approximation, auxiliary linear operator, auxiliary function and convergence control parameter. There are several methods to obtain the best value of the convergence-control parameter such as control of residual errors, minimization of error functional and optimal selection of the homotopy of auxiliary function which were introduced and suggested for the approximate solution of semi-linear elliptic equation in [29]. Moreover, an algorithm was proposed in [30] to optimize the solution of singular and integral equation of first kind via HAM by computing the optimal auxiliary control parameter value.
HAM has been used to solve several types of problems in crisp and fuzzy domains, e.g., fluid flow and heat transfer problems [31], fractional differential equations involving biological models [32], system of nonlinear ordinary differential equations describing HIV infection models [33], Abel’s integral equations of the first kind [34], fuzzy boundary value problem [35] and fuzzy delay differential equation [36].
The present work deals with the approximate solution of fuzzy Volterra integral equations of second kind, since to the best knowledge of the authors no study has been carried out by formulating the general concept of HAM from the crisp domain to the fuzzy domain for solving such class problems.
The paper is structured as follows. The Volterra integral equations of the second kind with the defuzzification details are recalled in the next section. A new description of the fuzzy HAM general formula is presented in Section 3, where a convergence analysis is also outlined. In Section 4, some test problems are considered and the numerical results discussed. Finally, there is a short conclusion that includes a summary of this work. Note that some of the basic fuzzy definitions, remarks and concepts not described in this paper are well-known. Notions of fuzzy level sets, fuzzy numbers and their operations, fuzzy functions, fuzzy Zadeh extension theory and integral of fuzzy functions can be easily retrieved from the literature, e.g., [9,37–41].
2 Fuzzy Volterra Integral Equation
The general fuzzy version of the standard second kind Volterra integral equation [9] is defined below:
where
Eq. (1) follows the properties of the standard second kind Volterra integral equation in crisp domain by means of defuzzification according to [9]. Hence, Eq. (1) with the fuzzy parametric forms are given as follows:
where
with
The sufficient conditions for the existence of a unique solution to Eq. (2) are given and proved in [11].
The crisp form of HAM was introduced in [42]. To describe the dynamic of the HAM under homotopy theory in the fuzzy domain, we start off with:
where
where
while if p = 1, one gets
Thus, by imposing
It is
From [13], if p = 0 and p = 1, the homotopy equations becomes
As p changes from 0 to 1, the fuzzy solution
where
The auxiliary linear operator L, the initial guess
which is one of the solutions of the given equation to be solved by HAM. Notice that if all the values of
which represents the homotopy perturbation method (HPM), implying that HPM is a special case of HAM [43]. From Eq. (10) the governing equations can be deduced from the zero-order deformation Eq. (12) by defining the vectors:
By deriving with respect to p both sides of Eq. (10) m times, at = 0, and after that dividing them by m!, we obtain the mth-order deformation equation
where
4 Fuzzy HAM for Fuzzy Volterra Integral Equations
In this section, the HAM solution of fuzzy Volterra integral equations is described in some steps.
Construct the zeroth-order deformation for Eq. (1) for all
Set the values of p = 0 and p = 1, implying
From Eq. (20), it follows that the fuzzy initial guess
where
From the mth-order deformation equation
where
Then the fuzzy HAM series solution can be written in the following form:
The convergence of Eq. (26) depends on selecting a suitable value of
It is worth noticing that since the defuzzification leads to a system of crisp equations, the theoretical achievements on the convergence in [30] can be adapted.
5 Dynamics of Fuzzy HAM Convergence
As mentioned before, the convergence of the approximate solution of Eq. (1) relies on the value of the parameter
then to use the least square method to optimize the values of
After that, the nonlinear equation coming from Eq. (29) in terms of
Finally, the equation is solved for
The HAM for seeking the approximate solution of Eq. (1) can be summarized in the following algorithm.
Step 1: Set the initial guess
Step 2: Set the value of
Step 3: Set number of terms, s.t.
Step 4: Set i = i + 1 and for i = 1 to
Step 5: Compute
Step 6: Set the fixed value of
Step 7: Define the residual form in Eq. (28) and use Eqs. (29)–(30) to find the best value of
Step 8: Replace again the optimal value of
In this section application examples are presented. For the remainder of this work,
Example 6.1: Consider the following linear fuzzy Volterra integral equation [13]:
where
The HAM formulation (see Section 5) for Eq. (33) is:
where the initial guess

Figure 1: Fifth-order fuzzy HAM solution
From Fig. 2, the range of the valid values of
Fig. 3 shows the absolute errors defined in Eq. (31) of the fifth-order fuzzy HAM solution for the values

Figure 2: Fifth-order fuzzy HAM solutions accuracy for different values of
To be more precise regarding the convergence of HAM, if the values of
From Fig. 3, one can easily deduce that for values of
Table 1: Best values of the convergence control parameter of fifth-order fuzzy HAM solution of Eq. (33) at r = 0.6


Figure 3: Fifth-order fuzzy HAM solutions for two different values of
Table 2: Fifth-order HAM lower solution and accuracy of Eq. (33) at t = 1 and

Table 3: Fifth-order HAM lower solution and accuracy for Eq. (33) at t = 1 and

Table 4: Fifth-order HAM upper solution and accuracy for Eq. (33) at t = 1 and h = 1 for all

Table 5: Fifth-order HAM upper solution and accuracy for Eq. (33) at t = 1 and

From Figs. 4, 5 one can notice that the fifth-order fuzzy HAM solutions of Eq. (31) are in the form of fuzzy numbers for any

Figure 4: Fifth-order fuzzy HAM solution for

Figure 5: Fifth-order HAM solution for
Example 6.2: Consider the following linear fuzzy Volterra integral equation [16]:
The exact solution of Eq. (36) is given by
The HAM formulation of Eq. (36) is:
where the initial guess is assumed to be

Figure 6:
The valid values of
Table 6: Best values of the convergence control parameter of sixth-order fuzzy HAM solution of Eq. (36) at r = 0.8

From Fig. 7, one can see that the optimal value of the convergence control parameters in Tab. 6 is

Figure 7: Sixth-order fuzzy HAM solution accuracy for some values of
Table 7: Sixth-order HAM solution of Eq. (36) at

Table 8: Sixth-order HAM solution of Eq. (36) at

In Tab. 9 there is a comparison of the mean errors by HAM, VIM and Taylor expansion method [16] (all of sixth-order) at
Table 9: Absolute mean error for the solution of Eq. (36) at

Clearly from Tab. 9 one can see that sixth-order HAM solution at the optimal value of the convergence control parameter

Figure 8: Sixth-order HAM for value

Figure 9: Sixth-order HAM solution for
Example 6.3: Find the solution of the following nonlinear fuzzy Volterra integral equation:
where
The HAM formulation of Eq. (39) is:
where the initial guess
The

Figure 10:
From Fig. 10 the valid values of

Figure 11: Fifth-order fuzzy HAM accuracy for some values of
Tabs. 10–13 shows the fifth-order HAM approximate solution of Eq. (39) and accuracy for different values of
Table 10: Fifth-order HAM lower solution and accuracy for Eq. (39) at t = 0.5 and h = −1 for

Table 11: Fifth-order HAM lower solution for Eq. (39) and accuracy at t = 0.5 and

Table 12: Fifth-order HAM upper solution of Eq. (39) and accuracy at t = 0.5 and h = −1 for

Table 13: Fifth-order HAM upper solution for Eq. (39) and accuracy at t = 0.5 and


Figure 12: Fifth-order HAM solution for

Figure 13: Fifth-order HAM solution for
Example 6.4: Consider the following linear fuzzy Volterra integral equation [9]:
The exact solution for Eq. (42) is given by
The HAM formulation of Eq. (42) is:
where the initial guess is assumed to be

Figure 14:
The valid values of
Table 14: Best values of the convergence control parameter of the fifth-order fuzzy HAM solution of Eq. (42) at r = 0.4

After testing the values of

Figure 15: Fifth-order fuzzy HAM solution for some values of
In Tab. 15, there is a comparison of the absolute errors and the results by fifth-order HAM at
Table 15: Absolute error by fifth-order HAM approximate solution of Eq. (42) for

From Tab. 15 one can see that the fifth-order HAM solution at the optimal value of the convergence control parameter

Figure 16: Fifth-order HAM solution for
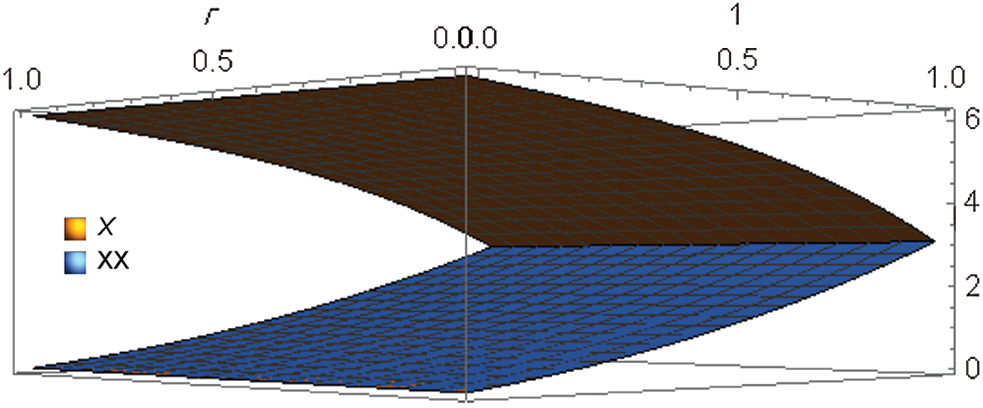
Figure 17: Fifth-order HAM solution for
This paper proposes HAM for solving fuzzy Volterra integral equation of the second kind with separable kernels. The fuzzy set theory was used to present a new formulation of HAM with application to the fuzzy Volterra integral equation of the second kind. The convergence of this approach was qualitatively discussed to find the optimal value of the convergence-control parameter. The examples presented show the potential of the method. Numerical results and graphs show that both linear and nonlinear fuzzy Volterra integral equations of the second type are well approximated by the method. Being a semi-analytical method, this approach has the advantage of lead to solutions in explicit form. The numerical experiments showed better performance of the method when compared against other approximation or numerical approaches such as VIM, the Taylor method and the Trapezoidal Quadrature Formula. Due to its accurate results, which do not violate the fuzzy sets theory solution, and a relatively low computational cost, HAM seems to be a reliable tool for solving fuzzy Volterra integral equation of the second kind. In future work, we will apply the approach to some problems in Biomathematics, such as cancer growth and epidemics.
Funding Statement: Dr. Ali Jameel and Noraziah Man are very grateful to the Ministry of Higher Education of Malaysia for providing them with the Fundamental Research Grant Scheme (FRGS) S/O No. 14188 that supported this research.
Conflicts of Interest: The authors declare that they have no conflicts of interest to report regarding the present study.
1. Yüzbaşı, Ş., Al-Khaled, K., Savaşaneril, N. B., Kumar, D. (2020). Introduction to the special issue on numerical methods for differential and integral equations. Computer Modeling in Engineering & Sciences, 123(3), 913–915. DOI 10.32604/cmes.2020.011225. [Google Scholar] [CrossRef]
2. Panda, S. K., Karapınar, E., Atangana, A. (2020). A numerical scheme and comparisons for fixed-point results with applications to the solutions of Volterra integral equations in dislocated extended b-metric space. Alexandria Engineering Journal, 59(2), 815–827. DOI 10.1016/j.aej.2020.02.007. [Google Scholar] [CrossRef]
3. Uddin, M., Ullah, N., Inayat, S. (2020). RBF based localized method for solving nonlinear partial integro-differential equations. Computer Modeling in Engineering & Sciences, 123(3), 957–972. DOI 10.32604/cmes.2020.08911. [Google Scholar] [CrossRef]
4. Jerri, A. (1999). Introduction to integral equations with applications. New York, NY, USA: Wiley. [Google Scholar]
5. Tomasiello, S., Khattri S. K., Awrejcewicz, J. (2017). Differential quadrature-based simulation of a class of fuzzy damped fractional dynamical systems. International Journal of Numerical Analysis and Modeling, 14(1), 63–75. [Google Scholar]
6. Mohamed, R., Talaat, S., Adel, R. H., Heba, S. O. (2020). An accurate and efficient technique for approximating fuzzy fredholm integral equations of the second kind using triangular functions. New Trends in Mathematical Sciences, 8(2), 29–43. DOI 10.20852/ntmsci.2020.403. [Google Scholar] [CrossRef]
7. Bica, A. M., Ziari, S. (2015). Iterative numerical method for fuzzy Volterra linear integral equations in two dimensions. Soft Computing, 21(5), 1097–1108. DOI 10.1007/s00500-016-2085-2. [Google Scholar] [CrossRef]
8. Ildar, M., Aleksandr, T., Denis, N. S. (2017). Numeric solution of Volterra integral equations of the first kind with discontinuous kernels. Journal of Computational and Applied Mathematics, 313(15), 119–128. DOI 10.1016/j.cam.2016.09.003. [Google Scholar] [CrossRef]
9. Saberirad, F., Karbassi, S. M., Heydari, M. (2019). Numerical solution of nonlinear fuzzy Volterra integral equations of the second kind for changing sign kernels. Soft Computing, 23(21), 1181–11197. DOI 10.1007/s00500-018-3668-x. [Google Scholar] [CrossRef]
10. Salehi, P., Nejatiyan, M. (2011). Numerical method for nonlinear fuzzy Volterra integral equations of the second kind. International Journal Industrial Mathematics, 3, 169–179. [Google Scholar]
11. Park, J. Y., Han, H. K. (1999). Existence and uniqueness theorem for a solution of fuzzy Volterra integral equations. Fuzzy Sets System, 105(3), 481–488. DOI 10.1016/S0165-0114(97)00238-8. [Google Scholar] [CrossRef]
12. Allahviranloo, T., Ghanbari, M., Nuraei, R. (2014). An application of a semi-analytical method on linear fuzzy Volterra integral equations. Journal of Fuzzy Set Valued Analysis, 2014, 1–15. DOI 10.5899/2014/jfsva-00161. [Google Scholar] [CrossRef]
13. Salahshour, S., Allahviranloo, T. (2013). Application of fuzzy differential transform method for solving fuzzy Volterra integral equations. Applied Mathematical Modelling, 37(3), 1016–1027. DOI 10.1016/j.apm.2012.03.031. [Google Scholar] [CrossRef]
14. Narayanamoorthy, S., Sathiyapriya, S. P. (2016). Homotopy perturbation method: A versatile tool to evaluate linear and nonlinear fuzzy Volterra integral equations of the second kind. SpringerPlus, 5(378), 1–16. DOI 10.1186/s40064-015-1659-2. [Google Scholar] [CrossRef]
15. Allahviranloo, T., Khezerloo, M., Ghanbari, M., Khezerloo, S. (2010). The homotopy perturbation method for fuzzy volterra integral equations. International Journal of Computational Cognition, 8(2), 32–37. [Google Scholar]
16. Biswas, S., Roy, T. K. (2017). Fuzzy linear integral equation and its application in biomathematical model. Advances in Fuzzy Mathematics, 12(5), 1137–1157. [Google Scholar]
17. Liao, S. J. (1992). The proposed homotopy analysis technique for the solution of nonlinear problems (Ph.D. Thesis). Shanghai Jiao Tong University. [Google Scholar]
18. Liao, S. J., Campo, A. (2002). Analytic solutions of the temperature distribution in Blasius viscous flow problems. Journal of Fluid Mechanics, 453, 411–425. DOI 10.1017/S0022112001007169. [Google Scholar] [CrossRef]
19. Liao, S. J. (2003). An explicit analytic solution to the Thomas–Fermi equation. Applied Mathematics and Computation, 144(2–3), 495–506. DOI 10.1016/S0096-3003(02)00423-X. [Google Scholar] [CrossRef]
20. Abbasbandy, S., Shivaniana, E., Vajravelu, K. (2011). Mathematical properties of h-curve in the framework of the homotopy analysis method. Communications in Nonlinear Science and Numerical Simulation, 16(11), 4268–4275. DOI 10.1016/j.cnsns.2011.03.031. [Google Scholar] [CrossRef]
21. Ahmad Soltania, L., Shivaniana, E., Ezzatia, R. (2016). Convection-radiation heat transfer in solar heat exchangers filled with a porous medium: Exact and shooting homotopy analysis solution. Applied Thermal Engineering, 103(13–14), 537–542. DOI 10.1016/j.applthermaleng.2016.04.107. [Google Scholar] [CrossRef]
22. Shaban, M., Shivanian, E., Abbasbandy, S. (2013). Analyzing magneto-hydrodynamic squeezing flow between two parallel disks with suction or injection by a new hybrid method based on the Tau method and the homotopy analysis method. European Physical Journal Plus, 128(11), 1–10. DOI 10.1140/epjp/i2013-13133-x. [Google Scholar] [CrossRef]
23. Liao, S. J. (2009). Series solution of nonlinear eigenvalue problems by means of the homotopy analysis method. Nonlinear Analysis: Real World Applications, 10(4), 2455–2470. DOI 10.1016/j.nonrwa.2008.05.003. [Google Scholar] [CrossRef]
24. Liao, S. J. (1997). A kind of approximate solution technique which does not depend upon small parameters. II. An application in fluid mechanics. International Journal of Non-Linear Mechanics, 32(5), 815–822. DOI 10.1016/S0020-7462(96)00101-1. [Google Scholar] [CrossRef]
25. Liao, S. J. (2009). Notes on the homotopy analysis method: Some definitions and theorems. Communications in Nonlinear Science and Numerical Simulation, 14(4), 983–997. DOI 10.1016/j.cnsns.2008.04.013. [Google Scholar] [CrossRef]
26. Vajravelu, K., van Gorder, R. A., (2012). Application of the homotopy analysis method to fluid flow problems. Nonlinear Flow Phenomena and Homotopy Analysis. Berlin, Heidelberg: Springer. [Google Scholar]
27. Mallory, K., van Gorder, R. A. (2014). Optimal homotopy analysis and control of error for solutions to the non-local Whitham equation. Numerical Algorithms, 66, 843–863. DOI 10.1007/s11075-013-9765-0. [Google Scholar] [CrossRef]
28. van Gorder, R. A., Vajravelu, K. (2009). On the selection of auxiliary functions, operators, and convergence control parameters in the application of the homotopy analysis method to nonlinear differential equations: A general approach. Communications in Nonlinear Science and Numerical Simulation, 14(12), 4078–4089. DOI 10.1016/j.cnsns.2009.03.008. [Google Scholar] [CrossRef]
29. van Gorder, R. A. (2012). Control of error in the homotopy analysis of semi-linear elliptic boundary value problems. Numerical Algorithms, 61(4), 613–629. DOI 10.1007/s11075-012-9554-1. [Google Scholar] [CrossRef]
30. Samad, N., Fariborzi Araghi, M. A., Adbbasbandy, S. (2019). Finding optimal convergence control parameter in the homotopy analysis method to solve integral equations based on the stochastic arithmetic. Numerical Algorithms., 81(1), 237–267. DOI 10.1007/s11075-018-0546-7. [Google Scholar] [CrossRef]
31. Khademinejad, T., Khanarmuei, M. R., Talebizadeh, P., Hamidi, A. (2015). On the use of the homotopy analysis method for solving the problem of the flow and heat transfer in a liquid film over an unsteady stretching sheet. Journal of Applied Mechanics and Technical Physics, 56(4), 654–666. DOI 10.1134/S0021894415040136. [Google Scholar] [CrossRef]
32. Devendra, K., Jagdev, S., Sushila (2013). Application of homotopy analysis transform method to fractional biological population model. Romanian Reports in Physics, 65(1), 63–75. [Google Scholar]
33. Pratibha, R., Divya, J., Saxena, V. P. (2016). Approximate analytical solution with stability analysis of HIV/AIDS model. Cogent Mathematics & Statistics, 3(1), 1–14. DOI 10.1080/23311835.2016.1206692. [Google Scholar] [CrossRef]
34. Samad, N., Eisa, Z., Hasan, B. K. (2016). Homotopy analysis transform method for solving Abel’s integral equations of the first kind. Ain Shams Engineering Journal, 7(1), 483–495. DOI 10.1016/j.asej.2015.03.006. [Google Scholar] [CrossRef]
35. Jameel, A. F., Anakira, N. R., Alomari, A. K., Alsharo, D. M., Saaban, A. (2019). New semi-analytical method for solving two point nth order fuzzy boundary value problem. International Journal of Mathematical Modelling and Numerical Optimisation, 9(1), 21–31. DOI 10.1504/IJMMNO.2019.100476. [Google Scholar] [CrossRef]
36. Jameel, A. F., Anakira, N. R., Alomari, A. K., Mahameed, M. A., Saaban, A. (2019). A new approximate solution of the fuzzy delay differential equations. International Journal of Mathematical Modelling and Numerical Optimisation, 9(3), 221–240. DOI 10.1504/IJMMNO.2019.100476. [Google Scholar] [CrossRef]
37. Bodjanova, S. (2006). Median alpha-levels of a fuzzy number. Fuzzy Sets and Systems, 157(7), 879–891. DOI 10.1016/j.fss.2005.10.015. [Google Scholar] [CrossRef]
38. Dubois, D., Prade, H. (1982). Towards fuzzy differential calculus. Part 3: Differentiation. Fuzzy Set Systems, 8(3), 225–233. DOI 10.1016/S0165-0114(82)80001-8. [Google Scholar] [CrossRef]
39. Xixiang, Z., Weimin, M., Liping, C. (2014). New similarity of triangular fuzzy number and its application. Scientific World Journal, 2014, 1–7. DOI 10.1155/2014/215047. [Google Scholar] [CrossRef]
40. Zadeh, L. A. (2005). Toward a generalized theory of uncertainty. Information Sciences, 172(2), 1–40. DOI 10.1016/j.ins.2005.01.017. [Google Scholar] [CrossRef]
41. Goestscel, R., Voxman, W. (1986). Elementary fuzzy calculus. Fuzzy Sets and Systems, 18(1), 31–34. DOI 10.1016/0165-0114(86)90026-6. [Google Scholar] [CrossRef]
42. Ibrahim, I., Obeng-Denteh, W., Patrick, A. A., Effah-Poku, S. (2016). Using homotopy analysis method for solving Volterra integral equations of the second kind. Theoretical Mathematics & Applications, 6(3), 85–100. [Google Scholar]
43. Turkyilmazoglu, M. (2011). Some issues on HPM and HAM methods: A convergence scheme. Mathematical and Computer Modelling, 53(9–10), 1929–1936. DOI 10.1016/j.mcm.2011.01.022. [Google Scholar] [CrossRef]
 | This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. |